Learning to Fly: Let's simulate evolution in Rust (pt 4)
This post is part of the learning-to-fly series:
This is the last part of the Learning to Fly series in which we're coding a simulation of evolution using neural network and genetic algorithm:
In today's, final episode:
------------ | \...%....| | \......| | @>....| | \...| | \.| ------------
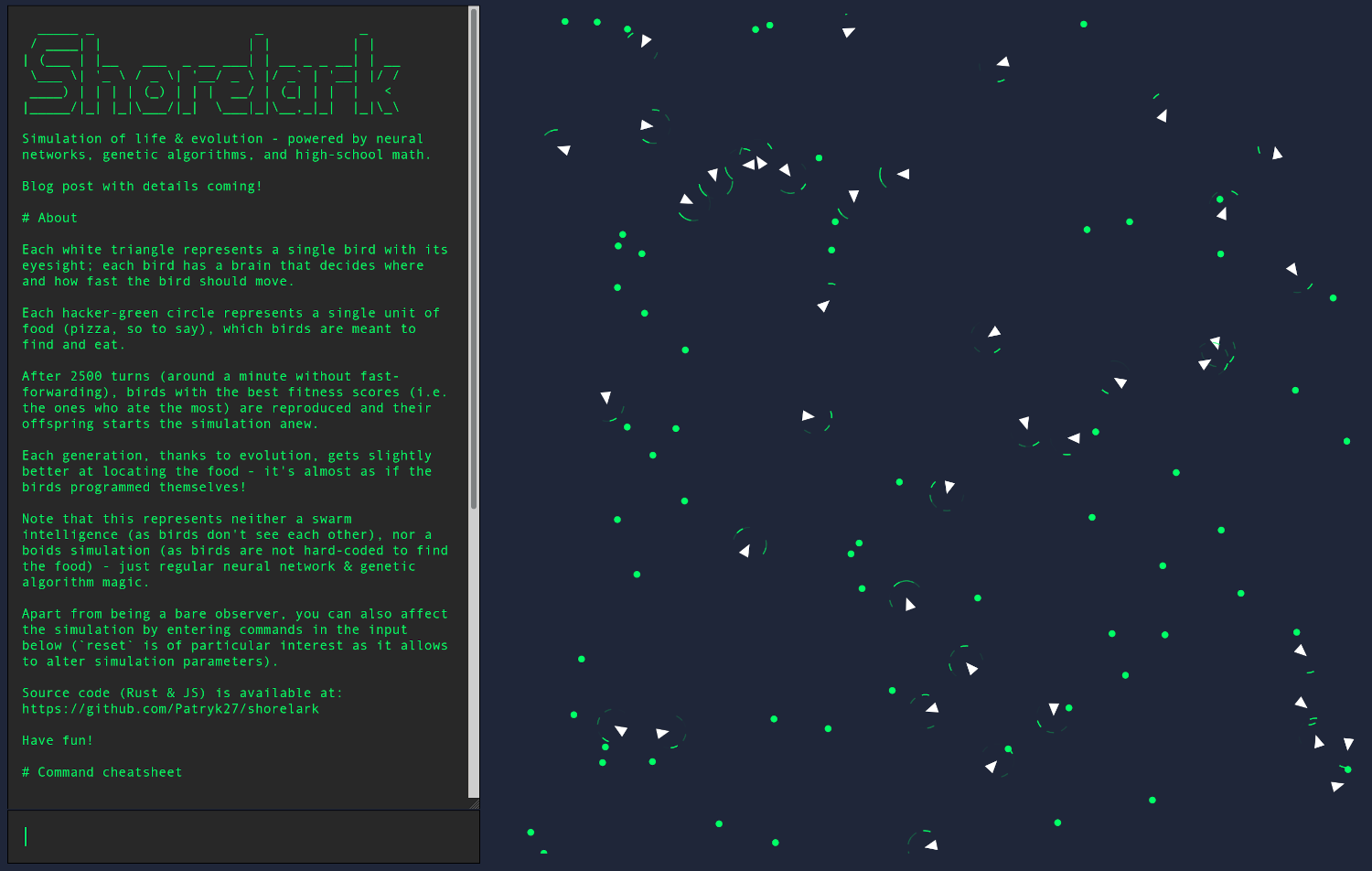
Now that we have implemented neural network and genetic algorithm, what awaits is the most delightful part: modelling the ecosystem and displaying them dancing triangles on our screens!
I'm obliged say that at this point we're basically on a runner's high, so if you considered the previous three parts even remotely interesting, then going through this one will feel like eating Nutella for the first time in your life.
content warning: this article contains traces of javascript
- > Plan
- > Prerequisites
- > Hello, WebAssembly World! (the Rust part)
- > Hello, WebAssembly World! (the JavaScript part)
- > Hello, WebAssembly World! (the summary part)
- > Hello, Simulation!
- > Hello, Graphics!
- > step()-ping stones
- > You’re Somebody Else (when you’re hungry)
- > Birdie and the Brain
- > Huggin' & Evolvin'
- > Ready, Set...
- > Ready, Set, Go!
- > Closing Thoughts
Plan
We've got struct NeuralNetwork and
struct GeneticAlgorithm - but what about
struct Eye or struct World? After all, our
birds have to have eyes and a place to live!

So that's what we'll be doing today; we'll implement all those
functions that'll determine what a bird sees or
how a bird moves. We'll also - at last! - create a user
interface that'll allow us to see beyond dry numbers; it's about time
we engage that visual cortex of ours better!
I'm not a great salesman, but lemme give it a shot - in a marketing gabble:
we'll see our code in action (!), in real-time (!!), in a web browser (!!!)
If you're into diagrams, what we're aiming for is:

As always, next to coding, we'll also investigate what's exactly happening underneath all the layers of abstractions we're given - if you're not into that, feel free to skip those yellow boxes.
Ready? Off we go!
Prerequisites
For a fearless WebAssembly experience, we'll need two extra tools:
-
npm(like Cargo, but for JavaScript), -
wasm-pack(set of tools that make compiling Rust into WebAssembly easier).
Before continuing, please install those tools according to the system you're using.
Hello, WebAssembly World! (the Rust part)
Let's begin by creating a new crate - as in the diagram, it will be responsible for interacting with our frontend application:
$ cd shorelark/libs $ cargo new simulation-wasm --lib --name lib-simulation-wasm # (this crate's name doesn't have to contain `wasm` - it's just a # convention of mine, so that the crate's purpose is explicit)
To make our crate WebAssembly-aware, there are two things we have to add to its manifest:
-
We have to set
crate-typetocdylib:libs/simulation-wasm/Cargo.toml[package] # ... [lib] crate-type = ["cdylib"]
-
We have to include
wasm-bindgenin our dependencies:libs/simulation-wasm/Cargo.toml# ... [dependencies] wasm-bindgen = "0.2"
When it comes to adjustments, that's all - now it's Rust-time!
Since creating the simulation will take some time, and it'd be nice to see something working as soon as possible, I say we begin by creating a function that we'll be able to invoke from JavaScript right away - you know, just to ensure that this "WebAssembly" thing isn't just a hoax:
pub fn whos_that_dog() -> String { "Mister Peanutbutter".into() }
If we were building a regular crate to publish on crates.io, that'd be
all - but for WebAssembly, there's one more thing we have to add,
#[wasm_bindgen]:
use wasm_bindgen::prelude::*; #[wasm_bindgen] pub fn whos_that_dog() -> String { "Mister Peanutbutter".into() }
To build a WebAssembly crate, we'll use that wasm-pack tool we've just installed:
$ cd simulation-wasm $ wasm-pack build
The difference between plain cargo and
wasm-pack is that the latter not only compiles the code,
but also generates a lot of handy JavaScript files that otherwise we'd
have to write by hand - we can find them all inside a newly-created
directory called pkg:
$ ls -l pkg total 36 -rw-r--r-- 1 pwy 110 Apr 2 17:20 lib_simulation_wasm.d.ts -rw-r--r-- 1 pwy 184 Apr 2 17:20 lib_simulation_wasm.js -rw-r--r-- 1 pwy 1477 Apr 2 17:20 lib_simulation_wasm_bg.js -rw-r--r-- 1 pwy 13155 Apr 2 17:20 lib_simulation_wasm_bg.wasm -rw-r--r-- 1 pwy 271 Apr 2 17:20 lib_simulation_wasm_bg.wasm.d.ts -rw-r--r-- 1 pwy 356 Apr 2 17:20 package.json
To ground ourselves, let's take a brief look at what we've got:
-
package.jsonis like npm'sCargo.toml- it contains metadata about the module itself:libs/simulation-wasm/pkg/package.json{ "name": "lib-simulation-wasm", "version": "0.1.0", /* ... */ }
-
lib_simulation_wasm.d.tscontains forward declarations for IDEs to provide type hints:libs/simulation-wasm/pkg/lib_simulation_wasm.d.ts/** * @returns {string} */ export function whos_that_dog(): string;
-
lib_simulation_wasm_bg.wasmis the essence, as it contains the WebAssembly bytecode of our crate; it's like.dllor.so, and you can use wabt to inspect it (mainly for fun, I guess):$ wasm2wat pkg/lib_simulation_wasm_bg.wasm(module (func (type 1) (param i32) (result i32) (local i32 i32 i32 i32) global.get 0 i32.const 16 i32.sub local.tee 11 ;; ...
-
lib_simulation_wasm_bg.jscontains a rather spine-chilling code that actually invokes our WebAssembly library:libs/simulation-wasm/pkg/lib_simulation_wasm_bg.js/** * @returns {string} */ export function whos_that_dog() { try { const retptr = wasm.__wbindgen_add_to_stack_pointer(-16); wasm.whos_that_dog(retptr); var r0 = getInt32Memory0()[retptr / 4 + 0]; var r1 = getInt32Memory0()[retptr / 4 + 1]; return getStringFromWasm0(r0, r1); } finally { wasm.__wbindgen_add_to_stack_pointer(16); wasm.__wbindgen_free(r0, r1); } }
Phew, that's a lot of information for one
fn() -> String that we still haven't seen
working - but that's only because I wanted to give you an introduction
as to "why wasm-pack generates so many files" and
"why no just cargo build" - later we won't be inspecting those
artifacts again.
So, now that our crate is compiled, <deep-breath />,
how do we run it?
Hello, WebAssembly World! (the JavaScript part)
Frontend time!
To start our frontend application, let's go back to the project's root
directory (next to our top-level Cargo.toml):
$ cd ../..
Setting up a frontend requires a bit of boilerplate too - luckily,
this time we can use npm init to copy-paste the
WebAssembly frontend template project
for us:
$ npm init wasm-app www
You should now see a directory called www with a handful
of files:
$ ls -l www total 248 -rw-r--r-- 1 pwy 10850 Apr 2 17:24 LICENSE-APACHE -rw-r--r-- 1 pwy 1052 Apr 2 17:24 LICENSE-MIT -rw-r--r-- 1 pwy 2595 Apr 2 17:24 README.md -rw-r--r-- 1 pwy 279 Apr 2 17:24 bootstrap.js -rw-r--r-- 1 pwy 297 Apr 2 17:24 index.html -rw-r--r-- 1 pwy 56 Apr 2 17:24 index.js -rw-r--r-- 1 pwy 209434 Apr 2 17:24 package-lock.json -rw-r--r-- 1 pwy 937 Apr 2 17:24 package.json -rw-r--r-- 1 pwy 311 Apr 2 17:24 webpack.config.js
... let's briefly go through them.
Knowing your enemy
Le point d'entrée, similar to Rust's main.rs, here
is index.html:
<!DOCTYPE html> <html> <head> <meta charset="utf-8"> <title>Hello wasm-pack!</title> </head> <body> <script src="./bootstrap.js"></script> </body> </html>
A quick primer on HTML:
-
<something>is called a tag, -
a tag has an opening:
<something>; and an ending:</something>, -
a tag might contain attributes:
key="value", -
a tag might contain children (i.e. more tags inside of it).
Overall, an HTML document describes a tree representation of the web page:
html
├── head
│ ├── meta
│ └── title
└── body
└── script
... which browser analyzes, trying to make something nice out of it.
Each tag has a certain meaning:
-
htmlwraps the entire document, -
headcontains document's metadata (such as its language or title), -
bodycontains document's contents, -
scriptloads and executes a JavaScript file, -
p(not used here, just provided as an example) prints text, -
b(ditto) prints text in bold:<body> <p>yes... ha ha ha... <b>yes!</b></p> </body>

Armed with all this knowledge, we can see that our page doesn't
actually do that much - the most important thing is that it loads
bootstrap.js:
import("./index.js") .catch(e => console.error("Error importing `index.js`:", e));
import is like Rust's use or
extern crate. Contrary to Rust, in JavaScript
import can be used as a statement, meaning that it
returns a value; in pseudo-Rust, what happens above is:
(mod "./index.js") .await .map_err(|err| { eprintln!("Error importing ...", err); });
We can see that this code loads index.js, so let's take a
look there:
import * as wasm from "hello-wasm-pack"; // ^-------------^ // defined in package.json wasm.greet();
This import is a bit different in that it resembles
extern crate more:
extern crate hello_wasm_pack as wasm; wasm::greet();
When it comes to the application's code itself, that's all.
We can also spot one more file, called
webpack.config.js - while we won't have to touch it, it
won't hurt to take a look either:
const CopyWebpackPlugin = require("copy-webpack-plugin"); const path = require('path'); module.exports = { entry: "./bootstrap.js", output: { path: path.resolve(__dirname, "dist"), filename: "bootstrap.js", }, mode: "development", plugins: [ new CopyWebpackPlugin(['index.html']) ], };
This file contains configuration for webpack, which is kinda like Cargo, but for JavaScript.
What To Do After You Know Your Enemy
Having exchanged pleasantries with the filesystem, let's get back to the business:
-
Currently
npmdoesn't know aboutlib-simulation-wasm- let's fix it:www/package.json{ /* ... */ "devDependencies": { "lib-simulation-wasm": "file:../libs/simulation-wasm/pkg", /* ... */ } }
-
After that, we have to let
npmknow about that change:$ cd www $ npm install
-
Now it's time for
index.js:www/index.jsimport * as sim from "lib-simulation-wasm"; alert("Who's that dog? " + sim.whos_that_dog() + "!");
-
With everything ready, we can now launch our application - this is basically
cargo run:$ npm run start
... ℹ 「wds」: Project is running at http://localhost:8080/ ...
When you now open this link in your browser, you'll be greeted with a peppy, springy & spry:
yay 🎉 yay
Hello, WebAssembly World! (the summary part)
So... what is all this?
Granted, displaying an alert message doesn't exactly qualify us for Da Nobel Prize (unless i'm mistaken in which case please let me know urgently thanks) - but our point was to get something running quickly and we did get something running pretty quickly.
In the next section, we'll lay the foundations for our simulation - just enough to have something to send to JavaScript.
Hello, Simulation!
As before, to keep the boundaries clean & tidy, let's start by creating a new crate:
$ cd ../libs $ cargo new simulation --lib --name lib-simulation
This crate will contain our simulation engine:
pub struct Simulation;
Now, to avoid conjuring a design out of thin air, let's recall our drawing from before:
What do we see there? Hmm, well - certainly a world:
pub struct Simulation { world: World, } #[derive(Debug)] pub struct World;
... which contains some animals (birds!) and foods (rich in protein & fiber!):
/* ... */ #[derive(Debug)] pub struct World { animals: Vec<Animal>, foods: Vec<Food>, } #[derive(Debug)] pub struct Animal; #[derive(Debug)] pub struct Food;
... which are located at some coordinates:
/* ... */ #[derive(Debug)] pub struct Animal { position: ?, } #[derive(Debug)] pub struct Food { position: ?, }
Our world is two-dimensional, which sets us at:
/* ... */ #[derive(Debug)] pub struct Animal { position: Point2, } #[derive(Debug)] pub struct Food { position: Point2, } #[derive(Debug)] pub struct Point2 { x: f32, y: f32, }
Moreover, animals are of certain rotati...
wait - did you hear that?
oh no
who's that?
oh no
🚨 it's the not-invented-here police 🚨
So far we've been writing a lot of code by hand - you know, that genetic algorithm and neural network, to name a few.
At least now, when it comes to a few mathematical data structures, I'd like to avoid reinventing the wheel - in part because there's barely anything educational in writing:
#[derive(Copy, Clone, Debug)] pub struct Point2 { x: f32, y: f32, } impl Point2 { pub fn new(...) -> Self { /* ... */ } /* ... */ } impl Add<Point2> for Point2 { /* ... */ } impl Sub<Point2> for Point2 { /* ... */ } impl Mul<Point2> for f32 { /* ... */ } impl Mul<f32> for Point2 { /* ... */ } #[cfg(test)] mod tests { /* ... */ }
... and in part because I'd like to introduce you to a crate that I love: nalgebra!
Quoting their documentation:
nalgebra is a linear algebra library written for Rust targeting:
General-purpose linear algebra (still lacks a lot of features...)
Real-time computer graphics.
Real-time computer physics.
In other words: math for the people, done right - and it plays nice with WebAssembly as well.
nalgebra provides a variety of tools: from simple functions such as clamp, through somewhat complicated structures such as quaternions, to our beloved point.
Since it's just a crate, installing it boils down to editing the manifest:
# ... [dependencies] nalgebra = "0.26"
... and then our code from a moment ago becomes:
use nalgebra as na; // --------- ^^ // | This kind of import - one that uses `as` - is called an alias. // | You'd say that we're aliasing `nalgebra` as `na`. // --- /* ... */ #[derive(Debug)] pub struct Animal { position: na::Point2<f32>, } #[derive(Debug)] pub struct Food { position: na::Point2<f32>, }
Where were we? Ah, right - animals are of certain rotation and speed:
/* ... */ #[derive(Debug)] pub struct Animal { position: na::Point2<f32>, rotation: na::Rotation2<f32>, speed: f32, } /* ... */
Now that we have a few models, it'd be nice if we could somehow construct them, so:
# ... [dependencies] nalgebra = "0.26" rand = "0.8"
... and while we're here, let's enable nalgebra's support for rand - it'll come handy in a moment:
# ... [dependencies] nalgebra = { version = "0.26", features = ["rand-no-std"] } rand = "0.8"
We'll start with a few rudimentary constructors that just randomize everything:
use nalgebra as na; use rand::{Rng, RngCore}; /* ... */ impl Simulation { pub fn random(rng: &mut dyn RngCore) -> Self { Self { world: World::random(rng), } } } impl World { pub fn random(rng: &mut dyn RngCore) -> Self { let animals = (0..40) .map(|_| Animal::random(rng)) .collect(); let foods = (0..60) .map(|_| Food::random(rng)) .collect(); // ^ Our algorithm allows for animals and foods to overlap, so // | it's hardly ideal - but good enough for our purposes. // | // | A more complex solution could be based off of e.g. // | Poisson disk sampling: // | // | https://en.wikipedia.org/wiki/Supersampling // --- Self { animals, foods } } } impl Animal { pub fn random(rng: &mut dyn RngCore) -> Self { Self { position: rng.gen(), // ------ ^-------^ // | If not for `rand-no-std`, we'd have to do awkward // | `na::Point2::new(rng.gen(), rng.gen())` instead // --- rotation: rng.gen(), speed: 0.002, } } } impl Food { pub fn random(rng: &mut dyn RngCore) -> Self { Self { position: rng.gen(), } } }
A getter is a function that allows to access object's state - a few of them will come useful:
/* ... */ impl Simulation { /* ... */ pub fn world(&self) -> &World { &self.world } } impl World { /* ... */ pub fn animals(&self) -> &[Animal] { &self.animals } pub fn foods(&self) -> &[Food] { &self.foods } } impl Animal { /* ... */ pub fn position(&self) -> na::Point2<f32> { // ------------------ ^ // | No need to return a reference, because na::Point2 is Copy. // | // | (meaning: it's so small that cloning it is cheaper than // | messing with references.) // | // | Of course you don't have to memorize which types are Copy // | and which aren't - if you accidentally return a reference // | to a type that's Copy, rust-clippy will point it out and // | suggest a change. // --- self.position } pub fn rotation(&self) -> na::Rotation2<f32> { self.rotation } } impl Food { /* ... */ pub fn position(&self) -> na::Point2<f32> { self.position } }
Nice?
-
world? ✅ exists
-
animals? ✅ exist
-
foods? ✅ exist
Nice.
There's a lot of code still missing, but at this point we've got enough to get ✨ something ✨ displayed on the screen via JavaScript.
All About That JS
Now, you might be wondering:
If we want to invoke this from JavaScript, shouldn't we have
#[wasm_bindgen]all over the place?
... to which I'll reply:
Excellent question! <high-fives himself />
I think that it's important to remember about
separation of concerns
- lib-simulation should be all about
"how to simulate evolution", not
"how to simulate evolution and integrate with
WebAssembly".
In a second we'll be implementing lib-simulation-wasm and
if we keep lib-simulation frontend-agnostic, it'll be
easy to create, say, lib-simulation-bevy or
lib-simulation-cli next - all sharing the same simulation
code underneath.
Ok, let's go back to lib-simulation-wasm - we have to
make it aware of rand and lib-simulation:
# ... [dependencies] rand = "0.8" wasm-bindgen = "0.2" lib-simulation = { path = "../simulation" } # ^ path relative to *this* Cargo.toml
Now inside lib-simulation-wasm we can refer to
lib_simulation:
use lib_simulation as sim;
... and implement a WebAssembly-aware wrapper (also known as proxy):
use lib_simulation as sim; use rand::prelude::*; use wasm_bindgen::prelude::*; #[wasm_bindgen] pub struct Simulation { rng: ThreadRng, sim: sim::Simulation, } #[wasm_bindgen] impl Simulation { #[wasm_bindgen(constructor)] pub fn new() -> Self { let mut rng = thread_rng(); let sim = sim::Simulation::random(&mut rng); Self { rng, sim } } }
As for baby steps, this looks good - let's try compiling it; surely nothing can fail just yet!
[INFO]: Checking for the Wasm target...
[INFO]: Compiling to Wasm...
Compiling getrandom v0.2.2
error: target is not supported, for more information see:
https://docs.rs/getrandom/#unsupported-targets
--> /home/pwy/.cargo/registry/src/...
3:9
|
213 | / compile_error!("target is not supported, for more information see: \\
214 | | https://docs.rs/getrandom/#unsupported-targets");
| |_________________________________________________________________________^
error[E0433]: failed to resolve: use of undeclared crate or module `imp`
--> /home/pwy/.cargo/registry/src/...
5:5
|
235 | imp::getrandom_inner(dest)
| ^^^ use of undeclared crate or module `imp`
ayy, ayy
Being honest, this error took me by surprise - fortunately, the
linked page
describes what's going on quite well: rand internally
depends on getrandom, which does support
WebAssembly inside a web browser environment, but only when asked
explicitly to:
# ... [dependencies] # ... getrandom = { version = "0.2", features = ["js"] }
Let's try rebuilding now:
[INFO]: Checking for the Wasm target...
[INFO]: Compiling to Wasm...
warning: field is never read: `rng`
...
warning: field is never read: `sim`
...
warning: 2 warnings emitted
Finished release [optimized] target(s) in 0.01s
[WARN]: origin crate has no README
[INFO]: Installing wasm-bindgen...
[INFO]: Optimizing wasm binaries with `wasm-opt`...
[INFO]: Optional fields missing from Cargo.toml: 'description',
'repository', and 'license'. These are not necessary, but
recommended
[INFO]: :-) Done in 0.63s
[INFO]: :-) Your wasm pkg is ready to publish at /home/pwy/Projects/...
On the JavaScript's side, we can now do:
import * as sim from "lib-simulation-wasm"; const simulation = new sim.Simulation(); // --------------- ^-^ // | For all practical purposes, this is a fancy syntax for Rust's: // | `Simulation::new()` // ---
Great, we've got the simulation engine up and running!
However it's a pretty quiet engine, that one, because currently it just randomizes some animals and foods, and goes quiet. To make it fun, let's propagate more data into JavaScript.
To do that, we'll need a few more models - they'll be kinda
copy-pasted from
lib-simulation, but with WebAssembly in mind:
/* ... */ #[wasm_bindgen] pub struct Simulation { /* ... */ } #[wasm_bindgen] #[derive(Clone, Debug)] pub struct World { pub animals: Vec<Animal>, } #[wasm_bindgen] #[derive(Clone, Debug)] pub struct Animal { pub x: f32, pub y: f32, } // ^ This model is smaller than `lib_simulation::Animal` - that's // | because a bird's position is all we need on the JavaScript's // | side at the moment; there's no need to map rest of the fields. /* ... */
... and two conversion methods:
/* ... */ #[wasm_bindgen] impl Simulation { /* ... */ } /* ... */ impl From<&sim::World> for World { fn from(world: &sim::World) -> Self { let animals = world.animals().iter().map(Animal::from).collect(); Self { animals } } } impl From<&sim::Animal> for Animal { fn from(animal: &sim::Animal) -> Self { Self { x: animal.position().x, y: animal.position().y, } } }
With all that in our editor, we can now add:
/* ... */ #[wasm_bindgen] impl Simulation { /* ... */ pub fn world(&self) -> World { World::from(self.sim.world()) } } /* ... */
... aaaand
oh my
heart starts to
beat faster
as i execute
$ wasm-pack build
aaaaand
oh no 😢
error[E0277]: the trait bound `Vec<Animal>: std::marker::Copy` is not satisfied --> libs/simulation-wasm/src/lib.rs | | pub animals: Vec<Animal>, | ^ the trait `std::marker::Copy` is not ... |
This happens because #[wasm_bindgen] automatically
creates getters and setters for JavaScript, but it requires for those
fields to be Copy - intuitively, the macro does something
similar to:
impl World { pub fn animals(&self) -> Vec<Animal> { self.animals } }
... which also wouldn't work, not without an explicit
.clone() - and that's exactly what we need to tell
#[wasm_bindgen]:
/* ... */ #[wasm_bindgen] #[derive(Clone, Debug)] pub struct World { #[wasm_bindgen(getter_with_clone)] pub animals: Vec<Animal>, } /* ... */
Call time!
import * as sim from "lib-simulation-wasm"; const simulation = new sim.Simulation(); const world = simulation.world();
All this should work... in theory - but how can we be sure our world contains any meaningful data? By using our own eyes!
Most browsers expose a thing called
developer console (also known as
developer tools), which you should be able to access by
pressing F12:
( Safari users might require an extra hoop.)

What can we do with this console? We can print stuff to it:
/* ... */ for (const animal of world.animals) { console.log(animal.x, animal.y); }
(I assume npm run start is still working in the
background - if it's not, remember to re-launch it.)
Nice - now that we know the positions of animals, it means we can draw them!
Hello, Graphics!
Drawing stuff in HTML + JavaScript is relatively painless - we'll use
a thing called
<canvas>:
<!DOCTYPE html> <html> <head> <meta charset="utf-8"> <title>Hello wasm-pack!</title> </head> <body> <canvas id="viewport"></canvas> <script src="./bootstrap.js"></script> </body> </html>
Our canvas has an attribute called id - this attribute is
used to identify tags, so that they can be easily found from inside
JavaScript:
/* ... */ const viewport = document.getElementById('viewport'); // ------------- ^------^ // | `document` is a global object that allows to access and modify // | current page (e.g. create or remove stuff from it). // ---
If you want to take a moment to digest what's happening, feel free to
console.log(viewport); and click through its properties -
there's a lot of them!
To display stuff on <canvas>, we have to request
for a specific drawing mode (think: 2D vs 3D):
/* ... */ const ctxt = viewport.getContext('2d');
So far, so good!
There are many methods and properties we can invoke on
ctxt - let's start by investigating
fillStyle and fillRect():
/* ... */ // --- // | Determines color of the upcoming shape. // - v-------v ctxt.fillStyle = 'rgb(255, 0, 0)'; // ------------------ ^-^ -^ -^ // | Each of those three parameters is a number from range 0 up to 255: // | // | rgb(0, 0, 0) = black // | // | rgb(255, 0, 0) = red // | rgb(0, 255, 0) = green // | rgb(0, 0, 255) = blue // | // | rgb(255, 255, 0) = yellow // | rgb(0, 255, 255) = cyan // | rgb(255, 0, 255) = magenta // | // | rgb(128, 128, 128) = gray // | rgb(255, 255, 255) = white // --- ctxt.fillRect(10, 10, 100, 50); // ---------- X Y W H // | Draws rectangle filled with color determined by `fillStyle`. // | // | X = position on the X axis (left-to-right) // | Y = position on the Y axis (top-to-bottom) // | W = width // | X = height // | // | (unit: pixels) // ---
Launching this code should make our <canvas> print
a red rectangle:

Ah, Mondrian would be so proud - I tell you: we're going places!
It’s My Data
Now that we know how to draw rectangles, let's bring our data back into the picture:
import * as sim from "lib-simulation-wasm"; const simulation = new sim.Simulation(); const viewport = document.getElementById('viewport'); const ctxt = viewport.getContext('2d'); ctxt.fillStyle = 'rgb(0, 0, 0)'; for (const animal of simulation.world().animals) { ctxt.fillRect(animal.x, animal.y, 15, 15); }
... and:

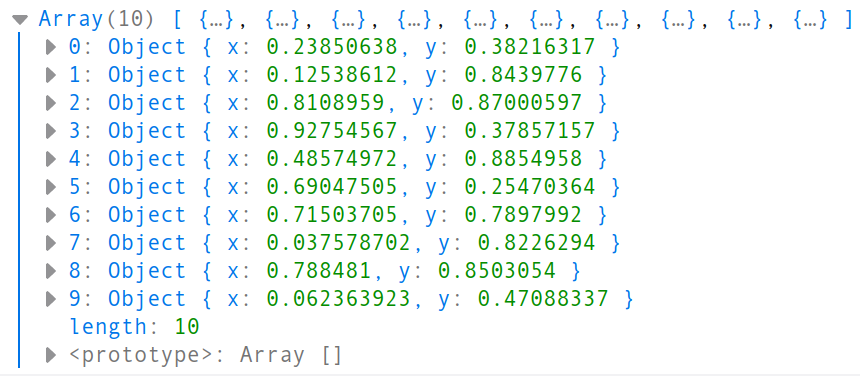
Well, ain't that a bummer - what happened? Let's investigate our data once again:
/* ... */ for (const animal of simulation.world().animals) { console.log(animal.x, animal.y); }
0.6751065850257874 0.9448947906494141 0.2537931203842163 0.4474523663520813 0.7111597061157227 0.731094241142273 0.20178401470184326 0.5820554494857788 0.7062546610832214 0.3024316430091858 0.030273854732513428 0.4638679623603821 0.48392945528030396 0.9207395315170288 0.49439138174057007 0.24340438842773438 0.5087683200836182 0.10066533088684082 /* ... */
Ah, positions of our animals belong to range
<0.0, 1.0>, while
<canvas> expects coordinates in the unit of a
pixel - we can fix this by scaling the numbers while rendering:
/* ... */ const viewport = document.getElementById('viewport'); const viewportWidth = viewport.width; const viewportHeight = viewport.height; /* ... */ for (const animal of simulation.world().animals) { ctxt.fillRect( animal.x * viewportWidth, animal.y * viewportHeight, 15, 15, ); }
... which gets us:
So... would you believe it, someone told me that squares are not fashionable anymore!
Apparently ▼ triangles ▲ are all the rage, so let's try drawing one.
Somewhat unluckily, JavaScript doesn't provide any method for printing triangles, requiring us to draw them manually vertex-by-vertex instead.
To get a grip of how it works, let's start with a hard-coded example:
/* ... */ // Starts drawing a polygon ctxt.beginPath(); // Moves cursor at x=50, y=0 ctxt.moveTo(50, 0); // Draws a line from (50,0) to (100,50) and moves cursor there // (this gets us the right side of our triangle) ctxt.lineTo(100, 50); // Draws a line from (100,50) to (0,50) and moves cursor there // (this gets us the bottom side of our triangle) ctxt.lineTo(0, 50); // Draws a line from (0,50) to (50,0) and moves cursor there // (this gets us the left side of our triangle) ctxt.lineTo(50, 0); // Fills our triangle with a black color // // (there's also `ctxt.stroke();`, which would render only our triangle's // outline instead.) ctxt.fillStyle = 'rgb(0, 0, 0)'; ctxt.fill();
... aaaand, what a beauty!

Since drawing a triangle requires a few steps, to make it easier to use, let's make it a function:
/* ... */ function drawTriangle(ctxt, x, y, size) { ctxt.beginPath(); ctxt.moveTo(x, y); ctxt.lineTo(x + size, y + size); ctxt.lineTo(x - size, y + size); ctxt.lineTo(x, y); ctxt.fillStyle = 'rgb(0, 0, 0)'; ctxt.fill(); } drawTriangle(ctxt, 50, 0, 50);
... or, a bit more idiomatic:
/* ... */ // --- // | The type of our `ctxt`. // v------------------ v CanvasRenderingContext2D.prototype.drawTriangle = function (x, y, size) { this.beginPath(); this.moveTo(x, y); this.lineTo(x + size, y + size); this.lineTo(x - size, y + size); this.lineTo(x, y); this.fillStyle = 'rgb(0, 0, 0)'; this.fill(); }; ctxt.drawTriangle(50, 0, 50);
Equipped with .drawTriangle(), we can now do:
<!-- ... --> <canvas id="viewport" width="800" height="800"></canvas> <!-- ... -->
/* ... */ for (const animal of simulation.world().animals) { ctxt.drawTriangle( animal.x * viewportWidth, animal.y * viewportHeight, 0.01 * viewportWidth, ); }
Nice 😎
... and you know what would be even nicer? If they were rotated!
Vertices Go Brr
We already have a field called rotation inside
lib-simulation:
/* ... */ #[derive(Debug)] pub struct Animal { /* ... */ rotation: na::Rotation2<f32>, /* ... */ }
... so all we've gotta do is to pass it into JavaScript:
/* ... */ #[wasm_bindgen] #[derive(Clone, Debug)] pub struct Animal { pub x: f32, pub y: f32, pub rotation: f32, } impl From<&sim::Animal> for Animal { fn from(animal: &sim::Animal) -> Self { Self { x: animal.position().x, y: animal.position().y, rotation: animal.rotation().angle(), } } } /* ... */
... now wasm-pack build:
... [INFO]: :-) Done in 2.42s [INFO]: :-) Your wasm pkg is ready to publish at /home/pwy/Projects/...
... and we're back to JavaScript.
Since the rotation will be different for each triangle, we'll need to have another parameter:
/* ... */ CanvasRenderingContext2D.prototype.drawTriangle = function (x, y, size, rotation) { /* ... */ }; /* ... */
Intuitively, what we're looking for is:

... but generalized for any angle.
Vertices Go Brrr (using math)
Let's bring back our triangle - this time, together with its circumscribed circle:

Under this circumstances, I'd casually describe rotating as moving each vertex alongside the circle "with" certain angle:

How do we know where to move those points? Well, whenever there's a circle involved, there's probably a fair share of trigonometry happening underneath - it's certainly true this time!
You might've heard of cos() and sin() -
while they aren't that impressive plotted separately:

... when we juxtapose both of them on a circle, we might just spot
that what
cos(angle) returns in practice is the
y coordinate of a point "rotated" with given angle - and,
similarly, sin(angle) gives the
x coordinate:

Speaking in code-terms - if what we have currently is:
this.moveTo(x, y);
... then rotating the x coordinate requires applying
- sin():
this.moveTo( x - Math.sin(rotation) * size, y, );
... and rotating the y coordinate requires applying
+ cos():
this.moveTo( x - Math.sin(rotation) * size, y + Math.cos(rotation) * size, );
... where rotation is measured in radians - that
is, <0°, 360°> shrank to
<0, 2 * PI>:
-
0° ⇒
rotation = 0 -
180° ⇒
rotation = PI -
360° ⇒
rotation = 2 * PI -
90° ⇒ 180° / 2 ⇒
rotation = PI / 2 -
45° ⇒ 180° / 4 ⇒
rotation = PI / 4 -
and so on.
Okie - one vertex done:

... two more to go!
Since the entire circle takes 360° and we've got three vertices to draw, then each vertex is going to occupy 360° / 3 = 120°; considering that first vertex lays on 0°, the second vertex is going to be located at 120°.
A quick conversion to radians, using proportions:
{ 2 * PI = 360°
{ x = 120°
^
|
v
360° * x = 2 * PI * 120° | divide by 2
180° * x = PI * 120° | divide by 180°
x = PI * 120° / 180° | simplify
x = PI * 2 / 3 | shuffle constant to left
x = 2 / 3 * PI | enjoy
... gives us:
this.moveTo( x - Math.sin(rotation) * size, y + Math.cos(rotation) * size, ); this.lineTo( x - Math.sin(rotation + 2.0 / 3.0 * Math.PI) * size, y + Math.cos(rotation + 2.0 / 3.0 * Math.PI) * size, );

Similarly, for the third vertex:
2 * PI = 360°
x = 120° + 120°
/* ... */
x = 4 / 3 * PI
... giving us:
this.moveTo( x - Math.sin(rotation) * size, y + Math.cos(rotation) * size, ); this.lineTo( x - Math.sin(rotation + 2.0 / 3.0 * Math.PI) * size, y + Math.cos(rotation + 2.0 / 3.0 * Math.PI) * size, ); this.lineTo( x - Math.sin(rotation + 4.0 / 3.0 * Math.PI) * size, y + Math.cos(rotation + 4.0 / 3.0 * Math.PI) * size, );

As you might see in the drawing, now we're missing only the very last edge going from the third vertex back into the first:

... so:
/* ... */ this.lineTo( x - Math.sin(rotation + 4.0 / 3.0 * Math.PI) * size, y + Math.cos(rotation + 4.0 / 3.0 * Math.PI) * size, ); this.lineTo( x - Math.sin(rotation) * size, y + Math.cos(rotation) * size, );
In all its glory, our code is:
/* ... */ CanvasRenderingContext2D.prototype.drawTriangle = function (x, y, size, rotation) { this.beginPath(); this.moveTo( x - Math.sin(rotation) * size, y + Math.cos(rotation) * size, ); this.lineTo( x - Math.sin(rotation + 2.0 / 3.0 * Math.PI) * size, y + Math.cos(rotation + 2.0 / 3.0 * Math.PI) * size, ); this.lineTo( x - Math.sin(rotation + 4.0 / 3.0 * Math.PI) * size, y + Math.cos(rotation + 4.0 / 3.0 * Math.PI) * size, ); this.lineTo( x - Math.sin(rotation) * size, y + Math.cos(rotation) * size, ); this.stroke(); }; ctxt.drawTriangle(50, 50, 25, Math.PI / 4);
Does it work? Apparently:
... but it's kinda hard to spot that it's rotated - what if we extruded one of the vertices?
/* ... */ CanvasRenderingContext2D.prototype.drawTriangle = function (x, y, size, rotation) { this.beginPath(); this.moveTo( x - Math.sin(rotation) * size * 1.5, y + Math.cos(rotation) * size * 1.5, ); /* ... */ this.lineTo( x - Math.sin(rotation) * size * 1.5, y + Math.cos(rotation) * size * 1.5, ); this.stroke(); }; /* ... */
There, better:
Animals Go Brrr
Now that we are able to render rotated triangles, we can adjust our code from before:
/* ... */ for (const animal of simulation.world().animals) { ctxt.drawTriangle( animal.x * viewportWidth, animal.y * viewportHeight, 0.01 * viewportWidth, animal.rotation, ); }
... which gives us:

Neat; high five, pal - we've earned it!
step()-ping stones
Stationary triangles are cool - obviously! -- but moving triangles are cooler.
Our birds don't have brains, but they do have rotation & speed - this means we can simulate physics on them, even if they won't be able to interact with their environment yet:
/* ... */ impl Simulation { /* ... */ /// Performs a single step - a single second, so to say - of our /// simulation. pub fn step(&mut self) { for animal in &mut self.world.animals { animal.position += animal.rotation * animal.speed; } } } /* ... */
One cargo check after:
error[E0277]: cannot multiply `Rotation<f32, 2_usize>` by `f32`
|
| animal.position += animal.rotation * animal.speed;
| ^
| -----------------------------------|
| no implementation for `Rotation<f32, 2_usize> * f32`
|
= help: the trait `Mul<f32>` is not implemented for
`Rotation<f32, 2_usize>`
Hmm, nalgebra doesn't provide Rotation2 * f32 - maybe we
can use a vector instead?
animal.position += animal.rotation * na::Vector2::new(0.0, animal.speed);
Finished dev [unoptimized + debuginfo] target(s) in 18.04s
Bingo!
With step() inside lib-simulation, we can
now expose it via lib-simulation-wasm:
/* ... */ #[wasm_bindgen] impl Simulation { /* ... */ pub fn step(&mut self) { self.sim.step(); } } /* ... */
... and compile:
.... [INFO]: :-) Done in 3.58s [INFO]: :-) Your wasm pkg is ready to publish at /home/pwy/Projects/...
As for invoking .step() from JavaScript - while in some
languages we might've used a loop:
/* ... */ while (true) { ctxt.clearRect(0, 0, viewportWidth, viewportHeight); simulation.step(); for (const animal of simulation.world().animals) { ctxt.drawTriangle( animal.x * viewportWidth, animal.y * viewportHeight, 0.01 * viewportWidth, animal.rotation, ); } }
... the web browser environment makes it a bit harder, because our code mustn't block. That's because when JavaScript is working, browser waits for it to finish, hanging the tab and preventing user from interacting with the page.
The more time it takes for the code to complete, the longer the tab is
blocked - it's essentially single-threaded. So if we wrote
while (true) { ... }, the browser would just hang the
tab forever, patiently waiting for the code to finish working.
Instead of blocking, we can use a function called
requestAnimationFrame()
- it schedules a function to be executed just before the next
frame is drawn and it itself finishes immediately:
/* ... */ function redraw() { ctxt.clearRect(0, 0, viewportWidth, viewportHeight); simulation.step(); for (const animal of simulation.world().animals) { ctxt.drawTriangle( animal.x * viewportWidth, animal.y * viewportHeight, 0.01 * viewportWidth, animal.rotation, ); } // requestAnimationFrame() schedules code only for the next frame. // // Because we want for our simulation to continue forever, we've // gotta keep re-scheduling our function: requestAnimationFrame(redraw); } redraw();
And voilà:
... or rather voil-whaaat - why do they disappear after a while?
Let's go back to lib-simulation and investigate:
/* ... */ impl Simulation { /* ... */ pub fn step(&mut self) { for animal in &mut self.world.animals { animal.position += animal.rotation * na::Vector2::new(animal.speed, 0.0); } } } /* ... */
So we add rotation to position and... ah, right! Our map is bounded
by
<0.0, 1.0> - anything beyond those coordinates can
exist, but it'd be rendered outside the canvas; as we've just seen.
Let's fix it:
/* ... */ impl Simulation { /* ... */ pub fn step(&mut self) { for animal in &mut self.world.animals { animal.position += animal.rotation * na::Vector2::new(0.0, animal.speed); animal.position.x = na::wrap(animal.position.x, 0.0, 1.0); animal.position.y = na::wrap(animal.position.y, 0.0, 1.0); } } } /* ... */
wrap()
does pretty much what it says - the first argument is the number being
checked, while the second and third arguments determine minimum and
maximum allowed values:
-
na::wrap(0.5, 0.0, 1.0) == 0.5(numbers between[min,max]are left untouched), -
na::wrap(-0.5, 0.0, 1.0) == 1.0(if number < min { return max; }), -
na::wrap(1.5, 0.0, 1.0) == 0.0(if number > max { return min; }).
With this fix, let's $ wasm-pack build - and:
Woohoo!
You’re Somebody Else (when you’re hungry)
All said, birds constitute for only half of our ecosystem - we've also got food.
Rendering food
Fortunately, because we've already written lots of the code, rendering food distills to just a few changes:
/* ... */ #[wasm_bindgen] #[derive(Clone, Debug)] pub struct World { #[wasm_bindgen(getter_with_clone)] pub animals: Vec<Animal>, #[wasm_bindgen(getter_with_clone)] pub foods: Vec<Food>, } impl From<&sim::World> for World { fn from(world: &sim::World) -> Self { let animals = world.animals().iter().map(Animal::from).collect(); let foods = world.foods().iter().map(Food::from).collect(); Self { animals, foods } } } /* ... */ #[wasm_bindgen] #[derive(Clone, Debug)] pub struct Food { pub x: f32, pub y: f32, } impl From<&sim::Food> for Food { fn from(food: &sim::Food) -> Self { Self { x: food.position().x, y: food.position().y, } } }
/* ... */ CanvasRenderingContext2D.prototype.drawTriangle = function (x, y, size, rotation) { /* ... */ }; CanvasRenderingContext2D.prototype.drawCircle = function(x, y, radius) { this.beginPath(); // --- // | Circle's center. // ----- v -v this.arc(x, y, radius, 0, 2.0 * Math.PI); // ------------------- ^ -^-----------^ // | Range at which the circle starts and ends, in radians. // | // | By manipulating these two parameters you can e.g. draw // | only half of a circle, Pac-Man style. // --- this.fillStyle = 'rgb(0, 0, 0)'; this.fill(); }; function redraw() { ctxt.clearRect(0, 0, viewportWidth, viewportHeight); simulation.step(); const world = simulation.world(); for (const food of world.foods) { ctxt.drawCircle( food.x * viewportWidth, food.y * viewportHeight, (0.01 / 2.0) * viewportWidth, ); } for (const animal of world.animals) { /* ... */ } /* ... */ } /* ... */
Believe me or not, it's enough!
.... [INFO]: :-) Done in 1.25s [INFO]: :-) Your wasm pkg is ready to publish at /home/pwy/Projects/...
Pimpin'-up
Our math checks out, but our simulation's appearance is... daunting - let's try pimpin' it up:
<!DOCTYPE html> <html> <head> <meta charset="utf-8"> <title>Shorelark</title> </head> <style> body { background: #1f2639; /* A nice navy blue color that I found by a nice trial and error */ } </style> <body> <canvas id="viewport" width="800" height="800"></canvas> <script src="./bootstrap.js"></script> </body> </html>
/* ... */ CanvasRenderingContext2D.prototype.drawTriangle = function (x, y, size, rotation) { /* ... */ this.fillStyle = 'rgb(255, 255, 255)'; // A nice white color this.fill(); }; CanvasRenderingContext2D.prototype.drawCircle = function(x, y, radius) { /* ... */ this.fillStyle = 'rgb(0, 255, 128)'; // A nice green color this.fill(); }; /* ... */
There, better:
Simulating food
At the moment, when our birdies collide with food, nothing happens - time to improve it!
First, let's refactor step() a bit:
/* ... */ impl Simulation { /* ... */ pub fn step(&mut self) { self.process_movements(); } fn process_movements(&mut self) { for animal in &mut self.world.animals { animal.position += animal.rotation * na::Vector2::new(0.0, animal.speed); animal.position.x = na::wrap(animal.position.x, 0.0, 1.0); animal.position.y = na::wrap(animal.position.y, 0.0, 1.0); } } } /* ... */
Now:
/* ... */ impl Simulation { /* ... */ pub fn step(&mut self) { self.process_collisions(); self.process_movements(); } fn process_collisions(&mut self) { todo!(); } /* ... */ } /* ... */
In plain English, what we want to achieve is:
/* ... */ fn process_collisions(&mut self) { for each animal { for each food { if animal collides with food { handle collision } } } } /* ... */
The process of checking whether two polygons collide is called hit-testing - so since our birds are triangles and our foods are circles, the thing we should be duckduckgoing for is "triangle circle hit test algorithm" (or "triangle circle collision" etc.).
But - funny thing - this kind of hit-testing is unbearably complex, so whaddya say we try something simpler, hang tight:
What if we assumed our birds are circles?
You know, we can keep drawing them as triangles - it's only about the physics.
Agreed? (just kidding, I know you can't reply here.)
Ok, so circle-circle hit testing relies on checking whether the distance between two cirles is shorter or equal than the sum of their radii:


In practice, this reduces to a single if:
/* ... */ pub fn step(&mut self, rng: &mut dyn RngCore) { self.process_collisions(rng); self.process_movements(); } fn process_collisions(&mut self, rng: &mut dyn RngCore) { for animal in &mut self.world.animals { for food in &mut self.world.foods { let distance = na::distance(&animal.position, &food.position); if distance <= 0.01 { food.position = rng.gen(); } } } } /* ... */
/* ... */ #[wasm_bindgen] impl Simulation { /* ... */ pub fn step(&mut self) { self.sim.step(&mut self.rng); } } /* ... */
The distance returned by nalgebra is in the same units as our positions - so a distance of, say, 0.5 means that our animal and food are half a map apart from each other, while 0.0 means that both are at the exact same coordinates.
0.01 determines the radius of our food - I've chosen
0.01 because it seems to play nice with the sizes we're
using for drawing.
Overall, does it work? Oh my!
Birdie and the Brain
Our birds can fly, but they can't interact with their environment yet - in this chapter we'll implement eyes, allowing for our birds to see the food, and brains, allowing for our birds to decide where they want to fly.
Refactoring
There's a lot of code inside libs/simulation/src/lib.rs -
before we go further, let's take a moment to refactor it.
A good rule of thumb is to keep a struct per file, so:
mod animal; mod food; mod world; pub use self::{animal::*, food::*, world::*}; use nalgebra as na; use rand::{Rng, RngCore}; pub struct Simulation { /* ... */ } impl Simulation { /* ... */ }
use crate::*; #[derive(Debug)] pub struct Animal { /* ... */ } impl Animal { /* ... */ }
use crate::*; #[derive(Debug)] pub struct Food { /* ... */ } impl Food { /* ... */ }
use crate::*; #[derive(Debug)] pub struct World { /* ... */ } impl World { /* ... */ }
... and now:
error[E0616]: field `animals` of struct `world::World` is private
--> libs/simulation/src/lib.rs
|
| for animal in &mut self.world.animals {
| ^^^^^^^ private field
error[E0616]: field `foods` of struct `world::World` is private
--> libs/simulation/src/lib.rs
|
| for food in &mut self.world.foods {
| ^^^^^ private field
/* ... */
Oh no, we've only shuffled some code around - what happened? Let's see the offending place:
/* ... */ impl Simulation { /* ... */ fn process_collisions(&mut self, rng: &mut dyn RngCore) { for animal in &mut self.world.animals { // ^------^ for food in &mut self.world.foods { // ^----^ /* ... */ } } } }
Previously, when all four structs were in the same file, Rust's visibility rules allowed for all of them to access each other's private fields. Now that our structs are in separate files, they can't access non-pub fields anymore.
There are two ways we could solve this issue:
-
We could provide mutable getters:
// libs/simulation/src/world.rs impl World { pub(crate) fn animals_mut(&mut self) -> &mut [Animal] { &mut self.animals } pub(crate) fn foods_mut(&mut self) -> &mut [Food] { &mut self.foods } } // libs/simulation/src/lib.rs impl Simulation { fn process_collisions(&mut self, rng: &mut dyn RngCore) { for animal in self.world.animals_mut() { for food in self.world.foods_mut() { /* ... */ } } } }
-
We could change
World's fields to be crate-public instead of private:#[derive(Debug)] pub struct World { pub(crate) animals: Vec<Animal>, pub(crate) foods: Vec<Food>, }
All fields (or functions, as seen in the first case) prepended with
pub(crate) are visible to the entire code inside given
crate - so pub(crate) animals means that all the code
inside lib-simulation will be able to access
world.animals, but it'll remain private for other crates.
As for the difference between both snippets, it's pretty minor:
-
Some people advocate for mutable getters, because they make refactoring easier (e.g. you can rename the field from
animalstobirds, but keepfn animals_mut()to avoid introducing a breaking change), -
Some people advocate for crate-public fields, because they make the code shorter (there's no need to create additional functions).
For simplicity, we'll go with the second approach:
/* ... */ #[derive(Debug)] pub struct Animal { pub(crate) position: na::Point2<f32>, pub(crate) rotation: na::Rotation2<f32>, pub(crate) speed: f32, } /* ... */
/* ... */ #[derive(Debug)] pub struct Food { pub(crate) position: na::Point2<f32>, } /* ... */
/* ... */ #[derive(Debug)] pub struct World { pub(crate) animals: Vec<Animal>, pub(crate) foods: Vec<Food>, } /* ... */
Checking lib-simulation v0.1.0
Checking lib-simulation-wasm v0.1.0
Finished dev [unoptimized + debuginfo] target(s) in 0.57s
Nice 😎 - now we're ready to implement eyes!
Eye Of The Birdie
What's an eye?
Well, a biologist might tell you that eye is an organ that provides vision; a philosopher's take might be that eye is a window to one's soul; and me? I think that an eye...
mod animal; mod eye; mod food; mod world; pub use self::{animal::*, eye::*, food::*, world::*};
... is a struct!
use crate::*; #[derive(Debug)] pub struct Eye;
Not just any struct, though - it's gotta have one function in particular:
/* ... */ impl Eye { pub fn process_vision() -> Vec<f32> { todo!() } }
The result of this function is a vector of numbers, where each number - each eye cell - tells us how close the nearest food matching that eye cell is:

Such an eye is defined by a few parameters:
use crate::*; use std::f32::consts::*; /// How far our eye can see: /// /// ----------------- /// | | /// | | /// | | /// |@ % %| /// | | /// | | /// | | /// ----------------- /// /// If @ marks our birdie and % marks food, then a FOV_RANGE of: /// /// - 0.1 = 10% of the map = bird sees no foods (at least in this case) /// - 0.5 = 50% of the map = bird sees one of the foods /// - 1.0 = 100% of the map = bird sees both foods const FOV_RANGE: f32 = 0.25; /// How wide our eye can see. /// /// If @> marks our birdie (rotated to the right) and . marks the area /// our birdie sees, then a FOV_ANGLE of: /// /// - PI/2 = 90° = /// ----------------- /// | /.| /// | /...| /// | /.....| /// | @>......| /// | \.....| /// | \...| /// | \.| /// ----------------- /// /// - PI = 180° = /// ----------------- /// | |.......| /// | |.......| /// | |.......| /// | @>......| /// | |.......| /// | |.......| /// | |.......| /// ----------------- /// /// - 2 * PI = 360° = /// ----------------- /// |...............| /// |...............| /// |...............| /// |.......@>......| /// |...............| /// |...............| /// |...............| /// ----------------- /// /// Field of view depends on both FOV_RANGE and FOV_ANGLE: /// /// - FOV_RANGE=0.4, FOV_ANGLE=PI/2: /// ----------------- /// | @ | /// | /.v.\ | /// | /.......\ | /// | --------- | /// | | /// | | /// | | /// ----------------- /// /// - FOV_RANGE=0.5, FOV_ANGLE=2*PI: /// ----------------- /// | | /// | --- | /// | /...\ | /// | |..@..| | /// | \.../ | /// | --- | /// | | /// ----------------- const FOV_ANGLE: f32 = PI + FRAC_PI_4; /// How much photoreceptors there are in a single eye. /// /// More cells means our birds will have more "crisp" vision, allowing /// them to locate the food more precisely - but the trade-off is that /// the evolution process will then take longer, or even fail, unable /// to find any solution. /// /// I've found values between 3~11 sufficient, with eyes having more /// than ~20 photoreceptors yielding progressively worse results. const CELLS: usize = 9; #[derive(Debug)] pub struct Eye { fov_range: f32, fov_angle: f32, cells: usize, } impl Eye { // FOV_RANGE, FOV_ANGLE & CELLS are the values we'll use during // simulation - but being able to create an arbitrary eye will // come handy during the testing: fn new(fov_range: f32, fov_angle: f32, cells: usize) -> Self { assert!(fov_range > 0.0); assert!(fov_angle > 0.0); assert!(cells > 0); Self { fov_range, fov_angle, cells } } pub fn cells(&self) -> usize { self.cells } pub fn process_vision( &self, position: na::Point2<f32>, rotation: na::Rotation2<f32>, foods: &[Food], ) -> Vec<f32> { todo!() } } impl Default for Eye { fn default() -> Self { Self::new(FOV_RANGE, FOV_ANGLE, CELLS) } }
The basic outline of our algorithm is:
/* ... */ pub fn process_vision(/* ... */) -> Vec<f32> { let mut cells = vec![0.0; self.cells]; for food in foods { if food inside fov { cells[cell that sees this food] += how close the food is; } } cells } /* ... */
How can we check if some food is inside our field of view? Two conditions must be fulfilled:
-
The distance between us and the food must be no greater than
FOV_RANGE:libs/simulation/src/eye.rs/* ... */ for food in foods { let vec = food.position - position; // ^ Represents a *vector* from food to us // // In case this is the first time you hear the word `vector`, a // quick definition would be: // // > A vector is an object that has *magnitude* (aka length) // > and *direction*. // // You could say a vector is an arrow: // // ---> this is a vector of magnitude=3 (if we count each // dash as a single "unit of space") and direction=0° // (at least relative to the X axis) // // | this is a vector of magnitude=1 and direction=90° // v (at least when we treat direction clockwise) // // Our food-to-birdie vectors are no different: // // --------- // | | gets us this vector: // |@ %| <----- // | | (magnitude=5, direction=180°) // --------- // // --------- gets us this vector: // | % | | // | | | // | @ | v // --------- (magnitude=2, direction=90°) // // This is not to be confused with Rust's `Vec` or C++'s // `std::vector`, which technically *are* vectors, but in a more // abstract sense -- better not to overthink it. // // (https://stackoverflow.com/questions/581426/why-is-a-c-vector-called-a-vector). // // --- // | Fancy way of saying "length of the vector". // ----------- v----v let dist = vec.norm(); if dist >= self.fov_range { continue; } } /* ... */
-
The angle between us and the food must be no greater than
FOV_ANGLE- and since our birdie's vision is symmetrical (they see the same amount "on the left" and "on the right", just like humans do), this means that our angle must be<-FOV_ANGLE/2, +FOV_ANGLE/2>:libs/simulation/src/eye.rs/* ... */ for food in foods { /* ... */ // Returns vector's direction relative to the Y axis, that is: // // ^ // | = 0° = 0 // // --> = 90° = -PI / 2 // // | = 180° = -PI // v // // (if you've been measuring rotations before - this is atan2 // in disguise.) let angle = na::Rotation2::rotation_between( &na::Vector2::y(), &vec, ).angle(); // Because our bird is *also* rotated, we have to include its // rotation too: let angle = angle - rotation.angle(); // Rotation is wrapping (from -PI to PI), that is: // // = angle of 2*PI // = angle of PI (because 2*PI >= PI) // = angle of 0 ( PI >= PI) // ( 0 < PI) // // angle of 2*PI + PI/2 // = angle of 1*PI + PI/2 (because 2*PI + PI/2 >= PI) // = angle of PI/2 ( PI + PI/2 >= PI) // ( PI/2 < PI) // // angle of -2.5*PI // = angle of -1.5*PI (because -2.5*PI <= -PI) // = angle of -0.5*PI ( -1.5*PI <= -PI) // ( -0.5*PI > -PI) // // Intuitively: // // - when you rotate yourself twice around the axis, it's the // same as if you rotated once, as if you've never rotated // at all. // // (your bony labyrinth might have a different opinion tho.) // // - when you rotate by 90° and then by 360°, it's the same // as if you rotated only by 90° (*or* by 270°, just in the // opposite direction). let angle = na::wrap(angle, -PI, PI); // If current angle is outside our birdie's field of view, jump // to the next food if angle < -self.fov_angle / 2.0 || angle > self.fov_angle / 2.0 { continue; } } /* ... */
Ok, we've rejected all the foods outside our birdie's field of view - for the eye to work, we need one more thing:
cells[cell that sees this food] += how close the food is;
Determining which concrete cell sees the food is a bit tricky, but it distills to looking at the angle between the food and our eye - e.g. for an eye with three cells and fov of 120°:

In the poetic language of code:
/* ... */ for food in foods { /* ... */ // Makes angle *relative* to our birdie's field of view - that is: // transforms it from <-FOV_ANGLE/2,+FOV_ANGLE/2> to <0,FOV_ANGLE>. // // After this operation: // - an angle of 0° means "the beginning of the FOV", // - an angle of self.fov_angle means "the ending of the FOV". let angle = angle + self.fov_angle / 2.0; // Since this angle is now in range <0,FOV_ANGLE>, by dividing it by // FOV_ANGLE, we transform it to range <0,1>. // // The value we get can be treated as a percentage, that is: // // - 0.2 = the food is seen by the "20%-th" eye cell // (practically: it's a bit to the left) // // - 0.5 = the food is seen by the "50%-th" eye cell // (practically: it's in front of our birdie) // // - 0.8 = the food is seen by the "80%-th" eye cell // (practically: it's a bit to the right) let cell = angle / self.fov_angle; // With cell in range <0,1>, by multiplying it by the number of // cells we get range <0,CELLS> - this corresponds to the actual // cell index inside our `cells` array. // // Say, we've got 8 eye cells: // - 0.2 * 8 = 20% * 8 = 1.6 ~= 1 = second cell (indexing from 0!) // - 0.5 * 8 = 50% * 8 = 4.0 ~= 4 = fifth cell // - 0.8 * 8 = 80% * 8 = 6.4 ~= 6 = seventh cell let cell = cell * (self.cells as f32); // Our `cell` is of type `f32` - before we're able to use it to // index an array, we have to convert it to `usize`. // // We're also doing `.min()` to cover an extreme edge case: for // cell=1.0 (which corresponds to a food being maximally to the // right side of our birdie), we'd get `cell` of `cells.len()`, // which is one element *beyond* what the `cells` array contains // (its range is <0, cells.len()-1>). // // Being honest, I've only caught this thanks to unit tests we'll // write in a moment, so if you consider my explanation // insufficient (pretty fair!), please feel free to drop the // `.min()` part later and see which tests fail - and why! let cell = (cell as usize).min(cells.len() - 1); } /* ... */
Now that we know the cell index, our final touch in here is:
/* ... */ for food in foods { /* ... */ // Energy is inversely proportional to the distance between our // birdie and the currently checked food; that is - an energy of: // // - 0.0001 = food is barely in the field of view (i.e. far away), // - 1.0000 = food is right in front of the bird. // // We could also model energy in reverse manner - "the higher the // energy, the further away the food" - but from what I've seen, it // makes the learning process a bit harder. // // As always, feel free to experiment! -- overall this isn't the // only way of implementing eyes. let energy = (self.fov_range - dist) / self.fov_range; cells[cell] += energy; } /* ... */
That's a lot of math! - how do we know it works? Of course, by testing it 😊
Nothing But Tests
The first obstacle is that our vision requires lot of parameters to compute:
-
FOV range (one
f32), -
FOV angle (one
f32), -
number of cells (one
usize), -
position (two
f32s), -
rotation (one
f32).
Even ignoring the number of cells - which we can hard-code without losing much - this gets us 5 different tunables that affect each other, plus we've also got to specify locations of our foods; moon on a stick, checking all of the combinations, I tell ya'!
The second obstacle is that our
Eye::process_vision() returns
Vec<f32>, so it's one of those functions that take
some dry numbers and return some dry numbers; not only it's a bit
boring, but also resilient to solid testing:
is vec![0.0, 0.1, 0.7] really the response we want for
x=0.2, y=0.5? who knows!
So, as for the first obstacle, my idea is to use a thing called parameterized tests - with a pinch of salt, parameterized tests are when you create a testing function:
#[test] fn some_test() { /* ... */ }
... and make it accept one or many parameters:
// This is just an example in pseudo-Rust #[test(x=10, y=20, z=30)] #[test(x=50, y=50, z=50)] #[test(x=0, y=0, z=0)] fn some_test(x: f32, y: f32, z: usize) { /* ... */ }
This testing methodology allows to cover the input space more
thoroughly than you'd do with copy-pasted mod { ... },
simply because adding more edge cases is just so easy.
Rust doesn't support parameterized tests natively - at least not in the manner that I've shown above - but there exist a few crates providing this functionality; we're going to use test-case:
# ... [dev-dependencies] test-case = "3.3.1"
... which has a pretty straightforward syntax:
/* ... */ #[cfg(test)] mod tests { use super::*; use test_case::test_case; #[test_case(1.0)] #[test_case(0.5)] #[test_case(0.1)] fn fov_ranges(fov_range: f32) { todo!() } }
This solves the first obstacle, at least for all the practical
purposes; while we still won't be able to cover all the cases
(remember how many numbers
f32 can encode?), the more test-cases we include, the
more confident we can be that our code works as intended.
As for the second hindrance: instead of comparing blunt vectors of number, whaddya say we compare graphical representations of what the bird sees?
Stay with me: even if process_vision() returns something
like vec![0.0, 0.5, 0.0], it doesn't mean we're forced to
compare that in our tests! If instead of a vector, what we compared
was, hmm, " * ", it'd be waay easier to ensure our eye
works correctly.
So, baby steps:
/* ... */ #[cfg(test)] mod tests { use super::*; use test_case::test_case; fn test( foods: Vec<Food>, fov_range: f32, fov_angle: f32, x: f32, y: f32, rot: f32, expected_vision: &str, ) { todo!() } #[test_case(1.0)] #[test_case(0.5)] #[test_case(0.1)] fn fov_ranges(fov_range: f32) { super::test( todo!(), fov_range, todo!(), todo!(), todo!(), todo!(), todo!(), ); } }
Hmmm, no - that's waaay too many parameters for a single function; how about a struct?
/* ... */ #[cfg(test)] mod tests { use super::*; use test_case::test_case; struct TestCase { foods: Vec<Food>, fov_range: f32, fov_angle: f32, x: f32, y: f32, rot: f32, expected_vision: &'static str, } impl TestCase { fn run(self) { todo!() } } #[test_case(1.0)] #[test_case(0.5)] #[test_case(0.1)] fn fov_ranges(fov_range: f32) { TestCase { foods: todo!(), fov_angle: todo!(), x: todo!(), y: todo!(), rot: todo!(), expected_vision: todo!(), fov_range, }.run() } }
Nice and readable; nice and readable.
Our test's result, expected_vision, depends on
fov_range, so it's a parameter, too:
/* ... */ #[test_case(1.0, "not sure yet")] #[test_case(0.5, "not sure yet")] #[test_case(0.1, "not sure yet")] fn fov_ranges(fov_range: f32, expected_vision: &'static str) { TestCase { foods: todo!(), fov_angle: todo!(), x: todo!(), y: todo!(), rot: todo!(), fov_range, expected_vision, }.run() } /* ... */
About that TestCase - from a birds-eye view, what we're
looking for is:
/* ... */ impl TestCase { fn run(self) { let eye = Eye::new(/* ... */); let actual_vision = eye.process_vision(/* ... */); let actual_vision = make_human_readable(actual_vision); assert_eq!(actual_vision, self.expected_vision); } } /* ... */
Since our TestCase already knows all the parameters
needed, we can start implementing it:
/* ... */ /// All our tests will use eyes hard-coded to thirteen eye cells. /// /// As for the "why": /// /// While we certainly *could* implement tests for different number of /// eye cells, after a while I've decided it's just not worth the /// hassle - as you'll see in a moment, we'll already get a good coverage /// via the other parameters, so creating a separate set of tests for /// different values of eye cells seemed like a waste of time. /// /// As for the "why this number in particular": /// /// I've checked a few numbers by hand and generally found 13 to yield /// pretty good results. As always, nothing special about 13 in /// particular, your (eye) mileage may vary. const TEST_EYE_CELLS: usize = 13; impl TestCase { fn run(self) { let eye = Eye::new(self.fov_range, self.fov_angle,TEST_EYE_CELLS); let actual_vision = eye.process_vision( na::Point2::new(self.x, self.y), na::Rotation2::new(self.rot), &self.foods, ); } } /* ... */
Currently our actual_vision is
Vec<f32> - we can convert it into a string via a
chip of .into_iter(), .map() and
.join() magic:
/* ... */ impl TestCase { fn run(self) { /* ... */ let actual_vision: Vec<_> = actual_vision .into_iter() .map(|cell| { // As a reminder, the higher cell's value, the closer // the food is: if cell >= 0.7 { // <0.7, 1.0> // food is right in front of us "#" } else if cell >= 0.3 { // <0.3, 0.7) // food is somewhat further "+" } else if cell > 0.0 { // <0.0, 0.3) // food is pretty far away "." } else { // 0.0 // no food in sight, this cell sees empty space " " } }) .collect(); // As before, there's nothing special about the cell values // (`0.7`, `0.3`, `0.0`) or the characters (`#`, `+`, `.`). // // I've chosen hash because to my eye it seems to occupy the // most "visual space" out of all the ASCII characters (thus // it represents a food being close), and then plus and dot // are just smaller (representing food being further away). // `.join()` converts `Vec<String>` into `String` using a // separator - e.g. `vec!["a", "b", "c"].join("|")` would // return `a|b|c`. let actual_vision = actual_vision.join(""); assert_eq!(actual_vision, self.expected_vision); } } /* ... */
Just like that, our testing framework is complete! 🥳
Now, as for the tests - allow me to present you pure beauty:
/* ... */ fn food(x: f32, y: f32) -> Food { Food { position: na::Point2::new(x, y), } } /// During tests in this module, we're using a world that looks /// like this: /// /// ------------- /// | | /// | | /// | @ | /// | v | `v` here indicates where the birdie is looking at /// | | /// | % | /// ------------- /// /// Each test gradually reduces our birdie's field of view and /// checks what the birdie sees: /// /// ------------- /// | | /// | | /// | @ | /// | /v\ | /// | /.....\ | `.` here indicates the part of view the birdie sees /// |/....%....\| /// ------------- /// /// ------------- /// | | /// | | /// | @ | /// | /v\ | /// | /.....\ | /// | % | /// ------------- /// /// ------------- /// | | /// | | /// | @ | /// | /.\ | /// | | /// | % | /// ------------- /// /// Over time, what we see is the food gradually disappearing /// into the emptiness: /// /// (well, technically the food and bird remain stationary - it's /// only the birdie's own field of view that gets reduced.) #[test_case(1.0, " + ")] // Food is inside the FOV #[test_case(0.9, " + ")] // ditto #[test_case(0.8, " + ")] // ditto #[test_case(0.7, " . ")] // Food slowly disappears #[test_case(0.6, " . ")] // ditto #[test_case(0.5, " ")] // Food disappeared! #[test_case(0.4, " ")] #[test_case(0.3, " ")] #[test_case(0.2, " ")] #[test_case(0.1, " ")] fn fov_ranges(fov_range: f32, expected_vision: &'static str) { TestCase { foods: vec![food(0.5, 1.0)], fov_angle: FRAC_PI_2, x: 0.5, y: 0.5, rot: 0.0, fov_range, expected_vision, }.run() } /* ... */
Breath in, breath out:
running 10 tests test eye::tests::fov_ranges::_0_4_ ... ok test eye::tests::fov_ranges::_0_2_ ... ok test eye::tests::fov_ranges::_0_5_ ... ok test eye::tests::fov_ranges::_0_1_ ... ok test eye::tests::fov_ranges::_0_3_ ... ok test eye::tests::fov_ranges::_0_8_ ... ok test eye::tests::fov_ranges::_0_9_ ... ok test eye::tests::fov_ranges::_1_0_ ... ok test eye::tests::fov_ranges::_0_7_ ... ok test eye::tests::fov_ranges::_0_6_ ... ok test result: ok. 10 passed; 0 failed
Ha, ha! - it works! And it's readable! (and, with luck, even maintainable!)
That's one parameter - four more to go! What about rotation?
/* ... */ /// World: /// /// ------------- /// | | /// | | /// |% @ | /// | v | /// | | /// ------------- /// /// Test cases: /// /// ------------- /// |...........| /// |...........| /// |%....@.....| /// |.....v.....| /// |...........| /// ------------- /// /// ------------- /// |...........| /// |...........| /// |%...<@.....| /// |...........| /// |...........| /// ------------- /// /// ------------- /// |...........| /// |.....^.....| /// |%....@.....| /// |...........| /// |...........| /// ------------- /// /// ------------- /// |...........| /// |...........| /// |%....@>....| /// |...........| /// |...........| /// ------------- /// /// ... and so on, until we do a full circle, 360° rotation: #[test_case(0.00 * PI, " + ")] // Food is to our right #[test_case(0.25 * PI, " + ")] #[test_case(0.50 * PI, " + ")] // Food is in front of us #[test_case(0.75 * PI, " + ")] #[test_case(1.00 * PI, " + ")] // Food is to our left #[test_case(1.25 * PI, " + ")] #[test_case(1.50 * PI, " +")] // Food is behind us #[test_case(1.75 * PI, " + ")] // (we continue to see it #[test_case(2.00 * PI, " + ")] // due to 360° fov_angle.) #[test_case(2.25 * PI, " + ")] #[test_case(2.50 * PI, " + ")] fn rotations(rot: f32, expected_vision: &'static str) { TestCase { foods: vec![food(0.0, 0.5)], fov_range: 1.0, fov_angle: 2.0 * PI, x: 0.5, y: 0.5, rot, expected_vision, }.run() } /* ... */
Testing positions is even more fun:
/* ... */ /// World: /// /// ------------ /// | | /// | %| /// | | /// | %| /// | | /// ------------ /// /// Test cases for the X axis: /// /// ------------ /// | | /// | /%| /// | @>.| /// | \%| /// | | /// ------------ /// /// ------------ /// | /.| /// | /..%| /// | @>...| /// | \..%| /// | \.| /// ------------ /// /// ... and so on, going further left /// (or, from the bird's point of view - going _back_) /// /// Test cases for the Y axis: /// /// ------------ /// | @>...| /// | \.%| /// | \.| /// | %| /// | | /// ------------ /// /// ------------ /// | /...| /// | @>..%| /// | \...| /// | \%| /// | | /// ------------ /// /// ... and so on, going further down /// (or, from the bird's point of view - going _right_) // Checking the X axis: // (you can see the bird is "flying away" from the foods) #[test_case(0.9, 0.5, "# #")] #[test_case(0.8, 0.5, " # # ")] #[test_case(0.7, 0.5, " + + ")] #[test_case(0.6, 0.5, " + + ")] #[test_case(0.5, 0.5, " + + ")] #[test_case(0.4, 0.5, " + + ")] #[test_case(0.3, 0.5, " . . ")] #[test_case(0.2, 0.5, " . . ")] #[test_case(0.1, 0.5, " . . ")] #[test_case(0.0, 0.5, " ")] // // Checking the Y axis: // (you can see the bird is "flying alongside" the foods) #[test_case(0.5, 0.0, " +")] #[test_case(0.5, 0.1, " + .")] #[test_case(0.5, 0.2, " + +")] #[test_case(0.5, 0.3, " + + ")] #[test_case(0.5, 0.4, " + + ")] #[test_case(0.5, 0.6, " + + ")] #[test_case(0.5, 0.7, " + + ")] #[test_case(0.5, 0.8, "+ + ")] #[test_case(0.5, 0.9, ". + ")] #[test_case(0.5, 1.0, "+ ")] fn positions(x: f32, y: f32, expected_vision: &'static str) { TestCase { foods: vec![food(1.0, 0.4), food(1.0, 0.6)], fov_range: 1.0, fov_angle: FRAC_PI_2, rot: 3.0 * FRAC_PI_2, x, y, expected_vision, }.run() } /* ... */
We've got only one more parameter left to cover: field of view's angle.
We'll use the same framework, but imagining what happens in here is tiny bit more complicated (or at least it took me a minute to ensure the behavior is correct):
/* ... */ /// World: /// /// ------------ /// |% %| /// | | /// |% %| /// | @> | /// |% %| /// | | /// |% %| /// ------------ /// /// Test cases: /// /// ------------ /// |% %| /// | /| /// |% /.%| /// | @>....| /// |% \.%| /// | \| /// |% %| /// ------------ /// /// ------------ /// |% /.%| /// | /...| /// |% /...%| /// | @>....| /// |% \...%| /// | \...| /// |% \.%| /// ------------ /// /// ------------ /// |%........%| /// |\.........| /// |% \......%| /// | @>....| /// |% /......%| /// |/.........| /// |%........%| /// ------------ /// /// ... and so on, until we reach the full, 360° FOV #[test_case(0.25 * PI, " + + ")] // FOV is narrow = 2 foods #[test_case(0.50 * PI, ". + + .")] #[test_case(0.75 * PI, " . + + . ")] // FOV gets progressively #[test_case(1.00 * PI, " . + + . ")] // wider and wider... #[test_case(1.25 * PI, " . + + . ")] #[test_case(1.50 * PI, ". .+ +. .")] #[test_case(1.75 * PI, ". .+ +. .")] #[test_case(2.00 * PI, "+. .+ +. .+")] // FOV is the widest = 8 foods fn fov_angles(fov_angle: f32, expected_vision: &'static str) { TestCase { foods: vec![ food(0.0, 0.0), food(0.0, 0.33), food(0.0, 0.66), food(0.0, 1.0), food(1.0, 0.0), food(1.0, 0.33), food(1.0, 0.66), food(1.0, 1.0), ], fov_range: 1.0, x: 0.5, y: 0.5, rot: 3.0 * FRAC_PI_2, fov_angle, expected_vision, }.run() } /* ... */
Nice:
test result: ok. 49 passed; 0 failed
So - we've got eyez, but what about brainz? Fortunately, we've already implemented it!
# ... [dependencies] # ... lib-neural-network = { path = "../neural-network" } # ...
/* ... */ use lib_neural_network as nn; use nalgebra as na; use rand::{Rng, RngCore}; /* ... */
/* ... */ #[derive(Debug)] pub struct Animal { /* ... */ pub(crate) eye: Eye, pub(crate) brain: nn::Network, } impl Animal { pub fn random(rng: &mut dyn RngCore) -> Self { /* ... */ let eye = Eye::default(); let brain = nn::Network::random( rng, &[ // The Input Layer // // Because our eye returns Vec<f32>, and our neural // network works on Vec<f32>, we can pass-through // numbers from eye into the neural network directly. // // Had our birdies had, I dunno, ears, we could do // something like: `eye.cells() + ear.nerves()` etc. nn::LayerTopology { neurons: eye.cells(), }, // The Hidden Layer // // There is no best answer as to "how many neurons // the hidden layer should contain" (or how many // hidden layers there should be, even - there could // be zero, one, two or more!). // // The rule of thumb is to start with a single hidden // layer that has somewhat more neurons that the input // layer and see how well the network performs. nn::LayerTopology { neurons: 2 * eye.cells(), }, // The Output Layer // // Since the brain will control our bird's speed and // rotation, this gives us two numbers = two neurons. nn::LayerTopology { neurons: 2 }, ], ); Self { /* ... */ eye, brain, } } /* ... */ }
/* ... */ // FRAC_PI_2 = PI / 2.0; a convenient shortcut use std::f32::consts::FRAC_PI_2; /// Minimum speed of a bird. /// /// Keeping it above zero prevents birds from getting stuck in one place. const SPEED_MIN: f32 = 0.001; /// Maximum speed of a bird. /// /// Keeping it "sane" prevents birds from accelerating up to infinity, /// which makes the simulation... unrealistic :-) const SPEED_MAX: f32 = 0.005; /// Speed acceleration; determines how much the brain can affect bird's /// speed during one step. /// /// Assuming our bird is currently flying with speed=0.5, when the brain /// yells "stop flying!", a SPEED_ACCEL of: /// /// - 0.1 = makes it take 5 steps ("5 seconds") for the bird to actually /// slow down to SPEED_MIN, /// /// - 0.5 = makes it take 1 step for the bird to slow down to SPEED_MIN. /// /// This improves simulation faithfulness, because - as in real life - /// it's not possible to increase speed from 1km/h to 50km/h in one /// instant, even if your brain very much wants to. const SPEED_ACCEL: f32 = 0.2; /// Ditto, but for rotation: /// /// - 2 * PI = it takes one step for the bird to do a 360° rotation, /// - PI = it takes two steps for the bird to do a 360° rotation, /// /// I've chosen PI/2, because - as our motto goes - this value seems /// to play nice. const ROTATION_ACCEL: f32 = FRAC_PI_2; impl Simulation { /* ... */ pub fn step(&mut self, rng: &mut dyn RngCore) { self.process_collisions(rng); self.process_brains(); self.process_movements(); } /* ... */ fn process_brains(&mut self) { for animal in &mut self.world.animals { let vision = animal.eye.process_vision( animal.position, animal.rotation, &self.world.foods, ); let response = animal.brain.propagate(vision); // --- // Remap response from 0.0 .. infinity to -1.0 ..= 1.0. let speed = response[0].clamp(0.0, 2.0) - 1.0; let rotation = response[1].clamp(0.0, 2.0) - 1.0; // --- // | Limits number to given range. // -------------- v---v let speed = speed.clamp(-SPEED_ACCEL, SPEED_ACCEL); let rotation = rotation.clamp(-ROTATION_ACCEL, ROTATION_ACCEL); // Our speed & rotation here are *relative* - that is: when // they are equal to zero, what the brain says is "keep // flying as you are now", not "stop flying". // // Both values being relative is crucial, because our bird's // brain doesn't know its own speed and rotation*, meaning // that it fundamentally cannot return absolute values. // // * they'd have to be provided as separate inputs to the // neural network, which would make the evolution process // waaay longer, if even possible. animal.speed = (animal.speed + speed).clamp(SPEED_MIN, SPEED_MAX); animal.rotation = na::Rotation2::new(animal.rotation.angle() + rotation); // (btw, there is no need for ROTATION_MIN or ROTATION_MAX, // because rotation automatically wraps from 2*PI back to 0 - // we've already witnessed that when we were testing eyes, // inside `fn rotations { ... }`.) } } /* ... */ }
Does it work? Let's find out!
... [INFO]: :-) Done in 12.20s [INFO]: :-) Your wasm pkg is ready to publish at /home/pwy/Projects/...
Oh my, oh my, oh my!
Birds were flying from continent to continent long before we were. They reached the coldest place on Earth, Antarctica, long before we did. They can survive in the hottest of deserts. Some can remain on the wing for years at a time. They can girdle the globe.
- David Attenborough about our simulation (hypothesized)
What we see is enchanting: each bird, equipped with a randomized brain, decides where it wants to fly, trying to adjust its behavior to its surroundings.
Some of our birds fly in circles, some exhibit more complex behaviors - and, if you're lucky (try refreshing the page a few times!), what you'll see is a bird actually steering into the food, as if it understood.
Currently this is pure luck though; our next, and the last, milestone will be about teaching - we'll augment our simulation with the final piece of puzzle: the genetic algorithm.
Huggin' & Evolvin'
Even though our birds can fly, their brains remain entirely random - in this chapter we'll see how we can integrate our simulation with the genetic algorithm, so that our birdies can learn & evolve.
Broadly speaking, we want to maximize the amount of food eaten - that'll be our fitness function; and the way we'll achieve that is that we'll run the simulation for some time (called a generation), note down how many foods have been eaten by each bird and then, uhm, reproduce the best birdies.
Let's get to it!
# ... [dependencies] # ... lib-genetic-algorithm = { path = "../genetic-algorithm" } lib-neural-network = { path = "../neural-network" } # ...
/* ... */ use lib_genetic_algorithm as ga; use lib_neural_network as nn; /* ... */
/* ... */ /// How much `.step()`-s have to occur before we push data into the /// genetic algorithm. /// /// Value that's too low might prevent the birds from learning, while /// a value that's too high will make the evolution unnecessarily /// slower. /// /// You can treat this number as "for how many steps each bird gets /// to live"; 2500 was chosen with a fair dice roll. const GENERATION_LENGTH: usize = 2500; pub struct Simulation { world: World, ga: ga::GeneticAlgorithm<ga::RouletteWheelSelection>, age: usize, } impl Simulation { pub fn random(rng: &mut dyn RngCore) -> Self { let world = World::random(rng); let ga = ga::GeneticAlgorithm::new( ga::RouletteWheelSelection, ga::UniformCrossover, ga::GaussianMutation::new(0.01, 0.3), // ---------------------- ^--^ -^-^ // | Chosen with a bit of experimentation. // | // | Higher values can make the simulation more chaotic, // | which - a bit counterintuitively - might allow for // | it to discover *better* solutions; but the trade-off // | is that higher values might also cause current, good // | enough solutions to be discarded. // --- ); Self { world, ga, age: 0 } } /* ... */ pub fn step(&mut self, rng: &mut dyn RngCore) { self.process_collisions(rng); self.process_brains(); self.process_movements(); self.age += 1; if self.age > GENERATION_LENGTH { self.evolve(rng); } } /* ... */ fn evolve(&mut self, rng: &mut dyn RngCore) { self.age = 0; // Step 1: Prepare birdies to be sent into the genetic algorithm let current_population = todo!(); // Step 2: Evolve birdies let evolved_population = self.ga.evolve(rng, ¤t_population); // Step 3: Bring birdies back from the genetic algorithm self.world.animals = todo!(); // Step 4: Restart foods // // (this is not strictly necessary, but it allows to easily spot // when the evolution happens - so it's more of a UI thing.) for food in &mut self.world.foods { food.position = rng.gen(); } } }
As you might remember, our
GenenticAlgorithm::evolve() requires for the "evolvable"
type to implement a trait called Individual:
impl<S> GeneticAlgorithm<S> where S: SelectionMethod, { /* ... */ pub fn evolve<I>(&self, rng: &mut dyn RngCore, population: &[I]) -> Vec<I> where I: Individual, { /* ... */ } }
... so a naïve approach could be to simply implement
Individual for Animal - after all, birdies
are the thing we want to evolve:
/* ... */ impl ga::Individual for Animal { fn create(chromosome: ga::Chromosome) -> Self { todo!() } fn chromosome(&self) -> &ga::Chromosome { todo!() } fn fitness(&self) -> f32 { todo!() } }
But as soon as we try to actually implement those, we get backed into
a corner - for instance: how can we implement
fn chromosome() that returns a reference to
ga::Chromosome if our Animal doesn't contain
a field called chromosome?
impl ga::Individual for Animal { /* ... */ fn chromosome(&self) -> &ga::Chromosome { &self.what // :'-( } /* ... */ }
Granted, you could say that since we control the code inside
lib-genetic-algorithm, we could just change
fn chromosome() to work on owned Chromosomes
instead - and you'd be right, partially! This doesn't actually solve
the underlying design issue, merely pushes it somewhere else:
/* ... */ impl ga::Individual for Animal { fn create(chromosome: ga::Chromosome) -> Self { Self { position: rng.gen(), // err: we don't have access to PRNG // in here! /* ... */ } } /* ... */ }
So, for the sake of argument, let's assume that our
ga::Individual is designed correctly - how can we
integrate Animal with it, then?
Most easily - by creating a dedicated struct:
/* ... */ mod animal; mod animal_individual; /* ... */ use self::animal_individual::*; use lib_genetic_algorithm as ga; use lib_neural_network as nn; /* ... */
use crate::*; pub struct AnimalIndividual; impl ga::Individual for AnimalIndividual { fn create(chromosome: ga::Chromosome) -> Self { todo!() } fn chromosome(&self) -> &ga::Chromosome { todo!() } fn fitness(&self) -> f32 { todo!() } }
As we see, this structure has to contain at least those two fields:
use crate::*; pub struct AnimalIndividual { fitness: f32, chromosome: ga::Chromosome, } impl ga::Individual for AnimalIndividual { fn create(chromosome: ga::Chromosome) -> Self { Self { fitness: 0.0, chromosome, } } fn chromosome(&self) -> &ga::Chromosome { &self.chromosome } fn fitness(&self) -> f32 { self.fitness } }
Let's go back to fn evolve() and see how it fits there:
/* ... */ fn evolve(&mut self, rng: &mut dyn RngCore) { self.age = 0; // Transforms `Vec<Animal>` to `Vec<AnimalIndividual>` let current_population: Vec<_> = self .world .animals .iter() .map(|animal| convert Animal to AnimalIndividual) .collect(); // Evolves this `Vec<AnimalIndividual>` let evolved_population = self.ga.evolve( rng, ¤t_population, ); // Transforms `Vec<AnimalIndividual>` back into `Vec<Animal>` self.world.animals = evolved_population .into_iter() .map(|individual| convert AnimalIndividual to Animal) .collect(); for food in &mut self.world.foods { food.position = rng.gen(); } } /* ... */
Seems like this might just work!
To implement those .map()s, we'll need two conversion
methods:
/* ... */ impl AnimalIndividual { pub fn from_animal(animal: &Animal) -> Self { todo!() } pub fn into_animal(self, rng: &mut dyn RngCore) -> Animal { todo!() } } /* ... */
... which allow us to:
/* ... */ fn evolve(&mut self, rng: &mut dyn RngCore) { /* ... */ let current_population: Vec<_> = self .world .animals .iter() .map(AnimalIndividual::from_animal) .collect(); /* ... */ self.world.animals = evolved_population .into_iter() .map(|individual| individual.into_animal(rng)) .collect(); /* ... */ } /* ... */
Ok, so: how can we implement those two conversion methods?
from_animal
Let's bring into the picture the important bits:
/* ... */ pub struct AnimalIndividual { fitness: f32, chromosome: ga::Chromosome, } impl AnimalIndividual { pub fn from_animal(animal: &Animal) -> Self { Self { fitness: todo!(), chromosome: todo!(), } } /* ... */ } /* ... */
What are we supposed to do inside ::from_animal()? Well,
looks like two things:
-
determine animal's fitness score,
-
determine animal's chromosome (aka genotype).
Finding out fitness score is pretty easy - since we already handle collisions, all we've gotta do is to count them:
/* ... */ #[derive(Debug)] pub struct Animal { /* ... */ /// Number of foods eaten by this animal pub(crate) satiation: usize, } impl Animal { pub fn random(rng: &mut dyn RngCore) -> Self { /* ... */ Self { /* ... */ satiation: 0, } } /* ... */ } /* ... */
/* ... */ impl Simulation { /* ... */ fn process_collisions(&mut self, rng: &mut dyn RngCore) { for animal in &mut self.world.animals { for food in &mut self.world.foods { /* ... */ if distance <= 0.01 { animal.satiation += 1; food.position = rng.gen(); } } } } /* ... */ } /* ... */
/* ... */ impl AnimalIndividual { pub fn from_animal(animal: &Animal) -> Self { Self { fitness: animal.satiation as f32, chromosome: todo!(), } } /* ... */ } /* ... */
Ah, I love when all the pieces just fit together.
When it comes to the second field, chromosome, there'll
be a bit more work there. As a reminder, what we mean by chromosome
here is weights of the neural network - so ideally we'd write:
/* ... */ impl AnimalIndividual { pub fn from_animal(animal: &Animal) -> Self { Self { /* ... */ chromosome: animal.brain.weights(), } } /* ... */ } /* ... */
... but our lib-neural-network's
Network doesn't have such method... yet!
To implement .weights(), let's go back to
lib-neural-network - what we're looking for is:
/* ... */ impl Network { /* ... */ pub fn weights(&self) -> Vec<f32> { todo!() } } /* ... */
For fun, let's start with a test:
/* ... */ #[cfg(test)] mod tests { /* ... */ #[test] fn weights() { let network = Network { layers: vec![ Layer { neurons: vec![Neuron { bias: 0.1, weights: vec![0.2, 0.3, 0.4], }], }, Layer { neurons: vec![Neuron { bias: 0.5, weights: vec![0.6, 0.7, 0.8], }], }, ], }; let actual = network.weights(); let expected = vec![0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8]; assert_relative_eq!(actual.as_slice(), expected.as_slice()); } }
As for the implementation, I'll show you three - one uses
for
loops, while the other two work on combinators:
-
Loops:
libs/neural-network/src/lib.rsimpl Network { /* ... */ pub fn weights(&self) -> Vec<f32> { let mut weights = Vec::new(); for layer in &self.layers { for neuron in &layer.neurons { weights.push(neuron.bias); for weight in &neuron.weights { weights.push(*weight); } } } weights } }
-
Combinators:
libs/neural-network/src/lib.rsuse std::iter::once; /* ... */ impl Network { /* ... */ pub fn weights(&self) -> Vec<f32> { self.layers .iter() .flat_map(|layer| layer.neurons.iter()) .flat_map(|neuron| once(&neuron.bias).chain(&neuron.weights)) .copied() .collect() } }
-
Combinators + iterator:
libs/neural-network/src/lib.rsuse std::iter::once; /* ... */ impl Network { /* ... */ pub fn weights(&self) -> impl Iterator<Item = f32> + '_ { self.layers .iter() .flat_map(|layer| layer.neurons.iter()) .flat_map(|neuron| once(&neuron.bias).chain(&neuron.weights)) .copied() } } /* ... */ #[cfg(test)] mod tests { /* ... */ #[test] fn weights() { /* ... */ let actual: Vec<_> = network.weights().collect(); /* ... */ } }
I consider the last approach better, because it allows you to avoid allocating the vector, but when push comes to shove, maintenability is usually more important than performance, so choose whichever version you prefer yourself.
Also, while we're here, let's implement the inverse -
::from_weights():
/* ... */ impl Network { /* ... */ pub fn from_weights( layers: &[LayerTopology], weights: impl IntoIterator<Item = f32>, ) -> Self { todo!() } /* ... */ } /* ... */
Ideally, we'd like for the following identity to hold:
network == Network::from_weights(network.weights())
... so let's base our tests exactly on that:
/* ... */ #[cfg(test)] mod tests { /* ... */ #[test] fn from_weights() { let layers = &[ LayerTopology { neurons: 3 }, LayerTopology { neurons: 2 }, ]; let weights = vec![0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8]; let network = Network::from_weights(layers, weights.clone()); let actual: Vec<_> = network.weights().collect(); assert_relative_eq!(actual.as_slice(), weights.as_slice()); } /* ... */ }
... and then an example implementation could be:
/* ... */ impl Network { /* ... */ pub fn from_weights( layers: &[LayerTopology], weights: impl IntoIterator<Item = f32>, ) -> Self { assert!(layers.len() > 1); let mut weights = weights.into_iter(); let layers = layers .windows(2) .map(|layers| { Layer::from_weights( layers[0].neurons, layers[1].neurons, &mut weights, ) }) .collect(); if weights.next().is_some() { panic!("got too many weights"); } Self { layers } } /* ... */ } impl Layer { /* ... */ fn from_weights( input_size: usize, output_size: usize, weights: &mut dyn Iterator<Item = f32>, ) -> Self { let neurons = (0..output_size) .map(|_| Neuron::from_weights(input_size, weights)) .collect(); Self { neurons } } /* ... */ } impl Neuron { /* ... */ fn from_weights( input_size: usize, weights: &mut dyn Iterator<Item = f32>, ) -> Self { let bias = weights.next().expect("got not enough weights"); let weights = (0..input_size) .map(|_| weights.next().expect("got not enough weights")) .collect(); Self { bias, weights } } /* ... */ }
Recreating network from weights is quite complex, so don't worry if this code takes a moment to sink-in - took a while to write, too!
Refactoring
Our Network has now everything we need to make it
compatible with genetic algorithm - but before we do that, let's take
a moment to refactor one thing.
Inside our Animal, what we have now is:
/* ... */ #[derive(Debug)] pub struct Animal { /* ... */ pub(crate) brain: nn::Network, /* ... */ } /* ... */
... and what I have on mind is to refactor
brain: nn::Network
into a distinct, em, body part:
/* ... */ pub use self::{animal::*, brain::*, eye::*, food::*, world::*}; mod animal; mod animal_individual; mod brain; /* ... */
use crate::*; #[derive(Debug)] pub struct Brain { pub(crate) nn: nn::Network, } impl Brain { pub fn random(rng: &mut dyn RngCore, eye: &Eye) -> Self { Self { nn: nn::Network::random(rng, &Self::topology(eye)), } } pub(crate) fn as_chromosome(&self) -> ga::Chromosome { self.nn.weights().collect() } fn topology(eye: &Eye) -> [nn::LayerTopology; 3] { [ nn::LayerTopology { neurons: eye.cells(), }, nn::LayerTopology { neurons: 2 * eye.cells(), }, nn::LayerTopology { neurons: 2 }, ] } }
/* ... */ #[derive(Debug)] pub struct Animal { /* ... */ pub(crate) brain: Brain, /* ... */ } impl Animal { pub fn random(rng: &mut dyn RngCore) -> Self { let eye = Eye::default(); let brain = Brain::random(rng, &eye); Self::new(eye, brain, rng) } pub(crate) fn as_chromosome(&self) -> ga::Chromosome { // We evolve only our birds' brains, but technically there's no // reason not to simulate e.g. physical properties such as size. // // If that was to happen, this function could be adjusted to // return a longer chromosome that encodes not only the brain, // but also, say, birdie's color. self.brain.as_chromosome() } /* ... */ fn new(eye: Eye, brain: Brain, rng: &mut dyn RngCore) -> Self { Self { position: rng.gen(), rotation: rng.gen(), speed: 0.002, eye, brain, satiation: 0, } } }
fn process_brains(&mut self) { for animal in &mut self.world.animals { /* ... */ let response = animal.brain.nn.propagate(vision); /* ... */ } }
All this allows us to complete
AnimalIndividual::from_animal():
/* ... */ impl AnimalIndividual { pub fn from_animal(animal: &Animal) -> Self { Self { fitness: animal.satiation as f32, chromosome: animal.as_chromosome(), } } /* ... */ } /* ... */
Once again, all the pieces fit together 🥳
into_animal
With our latest changes we can transform Animal into
AnimalIndividual and send it into the genetic algorithm -
now it's time to implement the reverse operation: given a brand-new
AnimalIndividual fresh from the genetic algorithm, we
have to convert it into Animal:
/* ... */ impl AnimalIndividual { /* ... */ pub fn into_animal(self, rng: &mut dyn RngCore) -> Animal { Animal::from_chromosome(self.chromosome, rng) } } /* ... */
/* ... */ impl Animal { /* ... */ /// "Restores" bird from a chromosome. /// /// We have to have access to the PRNG in here, because our /// chromosomes encode only the brains - and while we restore the /// bird, we have to also randomize its position, direction, etc. /// (so it's stuff that wouldn't make sense to keep in the genome.) pub(crate) fn from_chromosome( chromosome: ga::Chromosome, rng: &mut dyn RngCore, ) -> Self { let eye = Eye::default(); let brain = Brain::from_chromosome(chromosome, &eye); Self::new(eye, brain, rng) } pub(crate) fn as_chromosome(&self) -> ga::Chromosome { self.brain.as_chromosome() } /* ... */ } /* ... */
/* ... */ impl Brain { /* ... */ pub(crate) fn from_chromosome( chromosome: ga::Chromosome, eye: &Eye, ) -> Self { Self { nn: nn::Network::from_weights( &Self::topology(eye), chromosome, ), } } pub(crate) fn as_chromosome(&self) -> ga::Chromosome { self.nn.weights().collect() } /* ... */ }
Looks like... we're done! Are we done??
Ready, Set...
We're kinda-sorta done - while you could just launch
wasm-pack build, take your binoculars and start to watch
the wildlife mingle, there are two things we can do to make this
experience less frustrating:
-
First of all: since evolution happens once every 2500 steps and we perform 60 steps per second (there's one step per one frame, and the browser tries to keep steady 60 FPS¹), then in real-time we're talking about one evolution per ~40 seconds.
¹ or 120 FPS, or 144 FPS etc., depending on your display
If we wanted to witness birdies getting smarter and smarter, we'd have to wait around 10 generations (speaking from experience), so roughly 6.5 minutes. 6.5 minutes of bluntly staring into the screen - what a waste of time!
But if we had some kind of a "fast-forward" button...
-
Second of all: even if evolution works (with big emphasis on if, 'cause - you know - we're skeptics!), at the moment we'd have no way of knowing.
I mean, do our current birds really fly better than those from ten minutes ago?
Luckily to us, because we're digital, finding evidence for evolution gets pretty easy: we'll just enhance
lib-genetic-algorithmso that it returns statistics - such as the average fitness score - and we'll useconsole.log()to see if those statistics grow.
<slowly-breaths-out />
Our journey heads towards its end - the code that we'll write in a moment will be the culminating point of all the hard work we've done. So, my friend - are you ready to knock on wood and begin our final birdie-adventure?
Fast-Forward & Statistics
Inside our JavaScript code we invoke .step() only during
redraw() - that's what makes our simulation "stuck" to 60
FPS:
/* ... */ function redraw() { /* ... */ simulation.step(); /* ... */ } /* ... */
To make our simulation faster, we could either invoke
.step() many times at once:
/* ... */ function redraw() { /* ... */ // Performs 10 steps per frame, which makes simulation 10x faster // (at least if your computer can catch up!) for (let i = 0; i < 10; i += 1) { simulation.step(); } /* ... */ } /* ... */
... or, a bit better, we could provide a dedicated method that "fast-forwards" an entire generation - this way we could keep the simulation running at 1x speed and only bind this "fast-forwarding" to a button; make it fast-forward on-demand.
To use a shorter noun, instead of calling it
fn fast_forward(), let's go with fn train():
/* ... */ impl Simulation { /* ... */ pub fn step(&mut self, rng: &mut dyn RngCore) -> bool { /* ... */ self.age += 1; if self.age > GENERATION_LENGTH { self.evolve(rng); true } else { false } } /// Fast-forwards 'till the end of the current generation. pub fn train(&mut self, rng: &mut dyn RngCore) { loop { if self.step(rng) { return; } } } /* ... */ }
/* ... */ #[wasm_bindgen] impl Simulation { /* ... */ pub fn train(&mut self) { self.sim.train(&mut self.rng); } } /* ... */
<!-- ... --> <style> /* ... */ #train { position: absolute; top: 0; margin: 15px; } </style> <body> <canvas id="viewport" width="800" height="800"></canvas> <button id="train">train please, thank u</button> <script src="./bootstrap.js"></script> </body> <!-- ... -->
import * as sim from "lib-simulation-wasm"; let simulation = new sim.Simulation(); document.getElementById('train').onclick = function() { simulation.train(); }; const viewport = document.getElementById('viewport'); const viewportScale = window.devicePixelRatio || 1; /* ... */
Ok, now that we can speed-up the evolution, let's get our hands dirty
with statistics - the simplest thing we have at hand are fitness
scores, so
lib-genetic-algorithm seems like a nice place to
implement them:
/* ... */ impl<S> GeneticAlgorithm<S> where S: SelectionMethod, { /* ... */ pub fn evolve<I>(/* ... */) -> (Vec<I>, Statistics) where I: Individual, { assert!(!population.is_empty()); let new_population = (0..population.len()) .map(|_| { /* ... */ }) .collect(); let stats = Statistics::new(population); (new_population, stats) } } /* ... */ #[derive(Clone, Debug)] pub struct Statistics { pub min_fitness: f32, pub max_fitness: f32, pub avg_fitness: f32, } impl Statistics { fn new<I>(population: &[I]) -> Self where I: Individual, { assert!(!population.is_empty()); let mut min_fitness = population[0].fitness(); let mut max_fitness = min_fitness; let mut sum_fitness = 0.0; for individual in population { let fitness = individual.fitness(); min_fitness = min_fitness.min(fitness); max_fitness = max_fitness.max(fitness); sum_fitness += fitness; } Self { min_fitness, max_fitness, avg_fitness: sum_fitness / (population.len() as f32), } } }
/* ... */ impl Simulation { /* ... */ pub fn step(&mut self, rng: &mut dyn RngCore) -> Option<ga::Statistics> { /* ... */ if self.age > GENERATION_LENGTH { Some(self.evolve(rng)) } else { None } } pub fn train(&mut self, rng: &mut dyn RngCore) -> ga::Statistics { loop { if let Some(summary) = self.step(rng) { return summary; } } } /* ... */ fn evolve(&mut self, rng: &mut dyn RngCore) -> ga::Statistics { /* ... */ let (evolved_population, stats) = self.ga.evolve(rng, ¤t_population); /* ... */ stats } }
/* ... */ #[wasm_bindgen] impl Simulation { /* ... */ /// min = minimum amount of food eaten by any bird /// /// max = maximum amount of food eaten by any bird /// /// avg = sum of all the food eaten by all the birds, /// divided by the number of birds /// /// Median could also come useful! pub fn train(&mut self) -> String { let stats = self.sim.train(&mut self.rng); format!( "min={:.2}, max={:.2}, avg={:.2}", stats.min_fitness, stats.max_fitness, stats.avg_fitness, ) } }
/* ... */ document.getElementById('train').onclick = function() { console.log(simulation.train()); }; /* ... */
This time, when building, don't forget about the
--release switch - it enables optimizations which are
crucial to get .train()
working at reasonable performance:
... [INFO]: :-) Done in 40.00s [INFO]: :-) Your wasm pkg is ready to publish at /home/pwy/Projects/...
Ready, Set, Go!
Finally, ultimately, eventually, at last - the outcome of our diligent, assiduous coding; u ready?
Nice?
-
birdies are cute? ✅
-
birdies eat food? ✅
-
birdies learn to catch food better and better? ✅
Nice!
Closing Thoughts
Started from the bottom, haven't we?
From rough sketches, through our very first
struct Network, we've designed a genetic algorithm,
implemented tests for eyes (how awesome is that!) and ended up
with a bunch of self-governing birdies that certainly don't look like
this much code on the surface!
I'd like to thank you for your time - I hope this series showed you a fair share of Rust idioms, testing techniques and delivered on its promise of using WebAssembly in an interesting way.
And, champ, that's for you:

What now?
If you want to fiddle a bit on your own, there's still a few very interesting left things to do here!
You remember all those constants such as FOV_RANGE?
If instead of keeping them hard-coded, you made them configurable via
some
struct Config, you could then create an application
that'd check different combinations of those parameters, trying to
find the most optimal ones:
let mut stats = Vec::new(); for fov_range in vec![0.1, 0.2, 0.3, 0.4, ..., PI] { for fov_distance in vec![0.1, 0.2, 0.3, 0.4, ..., 1.0] { let current_stats = run_simulation( fov_range, fov_distance, /* ... */, ); stats.push((fov_range, fov_distance, current_stats)); } } // TODO using `stats`, find out which combinations yielded the best results
Bonus points for using rayon!
As a reminder: the entire source code, a bit refactored, is available here.